Question 1
Calculate
where
Solution:
The operation described here is the convolution of
By the sifting property, we know that:
Therefore, in our case:
Question 2
What’s the
Solution:
First, let’s rewrite the function in human readable math:
The norm of this signal is:
because
Question 3
What’s the
Solution:
Rewriting:
Therefore, the
Question 4
Is the continuous signal, that its spectrum is shown in the following figure, real? (Assume that
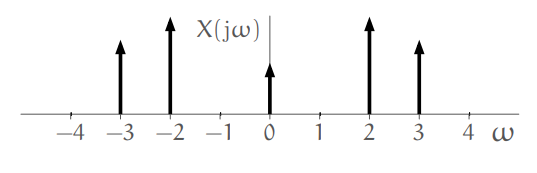
The relevant figure for questions 4, 5.
Solution:
Since the spectrum of the signal is symmetric and real, we can say that the signal itself is symmetric and real.
Question 5
Is the signal from the previous question periodic?
Solution:
The frequencies of a periodic signal are represented as impulses in its spectrum. So yes, the signal is periodic.
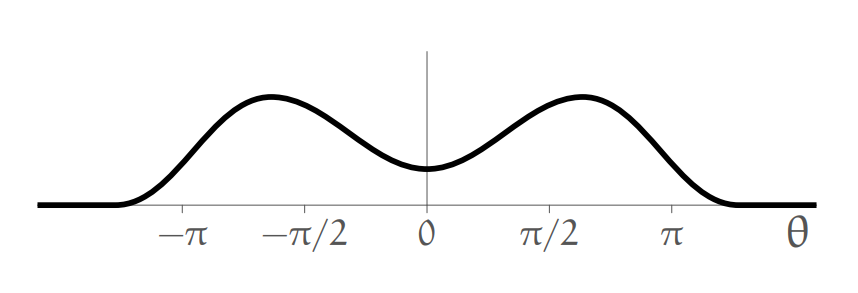
Question 6
Is the continuous signal, that its spectrum is shown in the following figure, real? (Assume that
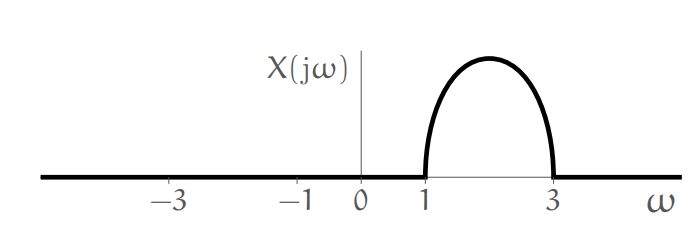
The relevant figure for questions 6, 7.
Solution:
The spectrum may be real, but it isn’t symmetric, meaning the the original signal isn’t real.
Question 7
Is the signal from the previous question periodic?
The frequencies of a periodic signal are represented as impulses in its spectrum. So no, the signal isn’t periodic.
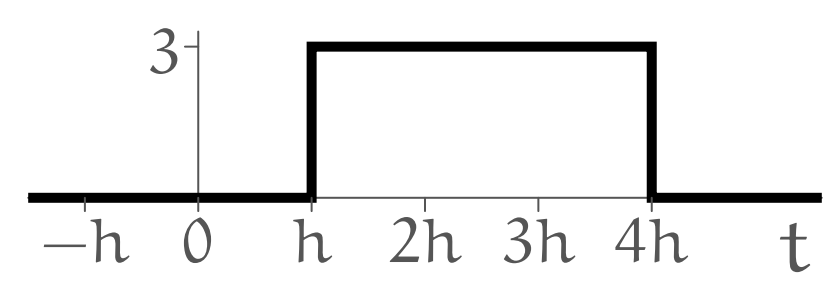
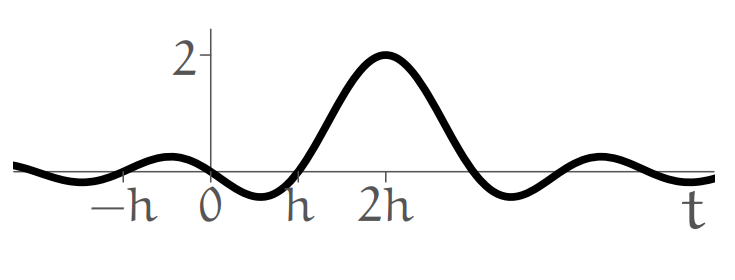
Question 8
Four continuous signals
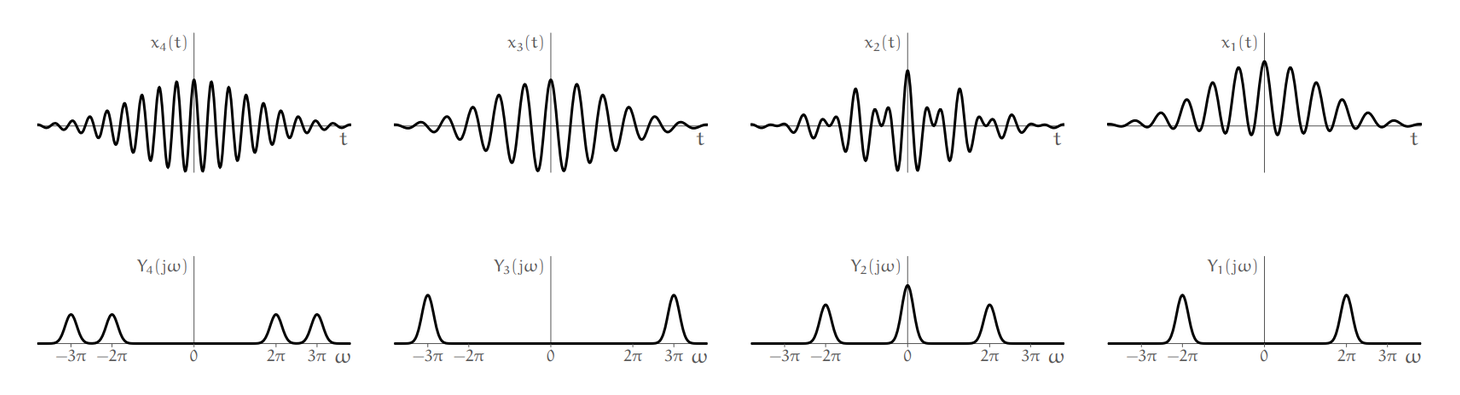
Signals in time and frequency domain
Match
Solution:
The signal
The signal
We are left with
Question 9
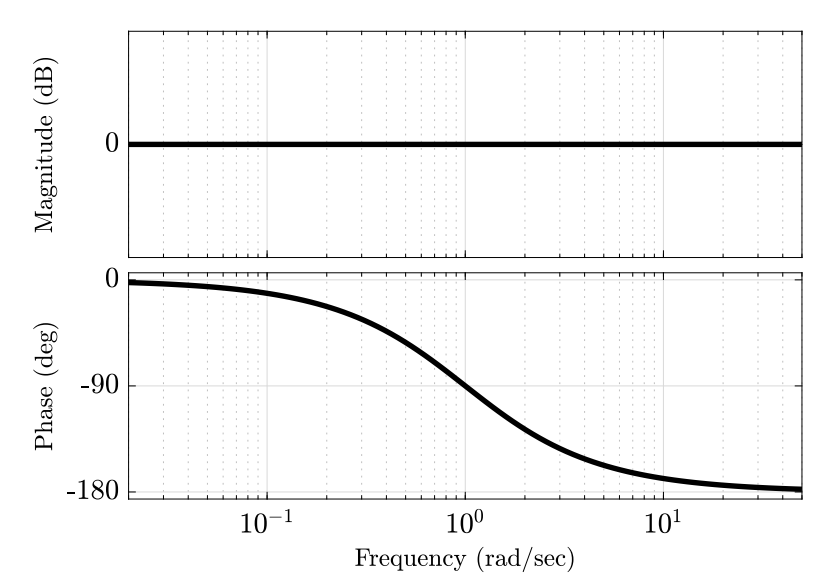
The spectrum of an analog signal
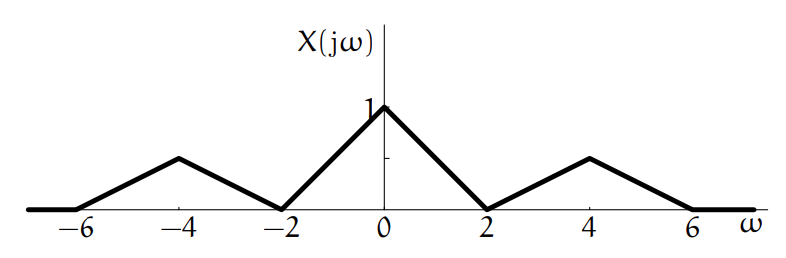
Spectrum of an analog signal.
Draw the spectrum of the sampled signal
Solution:
Because the sampling period is
which means we need to fold around

Spectrum of the corresponding sampled signal.
Question 10
The spectrum of an analog signal

Spectrum of an analog signal and its sampled form.
Solution:
From the previous question, we know that the spectrum of the sampled signal is a result of the analog signal folding around
Question 11
A discrete-time signal
Analog signal
.
What’s
Solution:
From the definition of zero-order hold we see that the discrete time signal is of the form:

The discrete-time signal
.
From the figure:
Question 12
A discrete-time signal
Analog signal
.
What’s
Solution:
A pulse (delta function) going though a
Question 13
Can the following graph be the spectrum of a discrete-time signal?
A general curve.
Solution:
No, its bounds aren’t
Question 14
Decompose the rational function
to partial fractions.
Solution:
Rewriting the function:
By partial fraction expansion:
Which is why:
Question 15
The function
Is the Laplace transform of
Solution:
We can think of Fourier transform as a special case of the Laplace transform - specifically on the imaginary axis. Since the Laplace transform doesn’t exist for
Question 16
Is the system
Solution:
Because
Question 17
Is the system
Solution:
For
Therefore, the system is linear.
Question 18
Is the system
Solution:
For
Therefore, the system is time-variant.
Question 19
Is the system
Solution:
Because
Question 20
Is the system
Solution:
For
Therefore, the system is not linear.
Question 21
Is the system
Solution:
For
Therefore, the system is time-invariant.
Question 22
Is a linear system
Solution:
In general, no, because of initial conditions
Question 23
Is a system that its impulse response
Solution:
A LTI system is causal iff
Question 24
Is a system that its impulse response
Solution:
A LTI system is BIBO stable iff
Which by special integrals, we know isn’t bounded. Therefore, the system isn’t BIBO stable.
Question 25
Is a system that its impulse response
Solution:
A LTI system is causal iff
Question 26
Is a system that its impulse response
Solution:
A LTI system is BIBO stable iff
Which by special integrals, we know is bounded. Therefore, the system is BIBO stable.
Question 27
What’s the transfer function of
Solution:
Rearranging, we get:
Applying the Laplace transform to both sides of the equation, we get:
Question 28
What’s the transfer function of
Solution:
Rearranging, we get:
Applying the z-transform to both sides of the equation, we get:
Question 29
What’s the impulse response of
Solution:
Substituting
Question 30
What’s the transfer function of
Solution:
Applying the Laplace transform to both sides of the equation, we get:
Question 31
Is the system with transfer function
stable and causal?
Solution:
The system isn’t proper, therefore it isn’t causal and stable.
Question 32
Is the system with transfer function
stable and causal?
Solution:
To check stability and causality, we can see that all the coefficients of the denominator are non-zero and have the same sign, which means it at least satisfies the necessary condition for stability. For the sufficient condition, we know that for a third-order polynomial we also need to check:
Since this is not true, we conclude that the system isn’t causal and stable.
Question 33
Is the system with transfer function
stable and causal?
Solution:
The only difference from the previous question is that we need to recheck the
the sufficient condition. We know that for a third-order polynomial need to make sure that:
Since this is true, we conclude that the system is causal and stable.
Question 34
Is the system with transfer function
causal?
Solution:
The system isn’t proper, therefore it isn’t causal.
Question 35
Is the system with transfer function
stable?
The single pole of this system is
Question 36
Is the system with transfer function
causal?
Solution:
The system is proper, therefore it is causal.
Question 37
Is the system with transfer function
stable?
Solution:
The poles of this system are:
Both of these poles are inside the open unit circle, which means the denominator is Schur, and the system is stable.
Question 38
Rearranging the function:
By first-order system transfer function:
Question 39
Rearranging the function:
By second-order system transfer function:
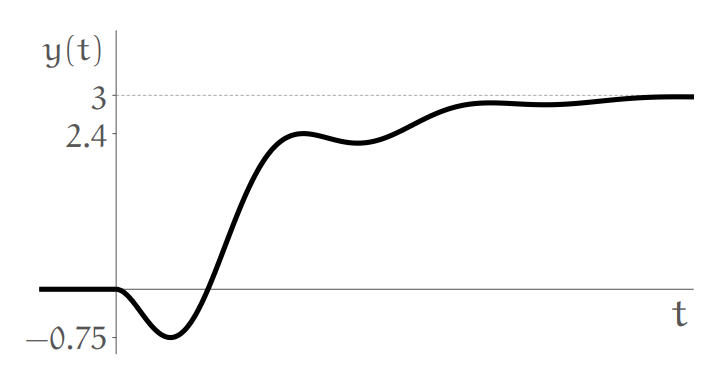
Question 40
What’s the overshoot and undershoot response for the following step response, in

Step response.
Solution:
By definition:
Question 41
What’s the overshoot and undershoot response for the following step response, in
Solution:
Step response.
By definition:
Question 42
Which of the two transfer functions
Solution:
Rearranging
The transient response is mainly shaped by
Question 43
Which of the following systems’ frequency response have a larger overshoot:
Solution:
From the standard forms we know that:
Because the only difference in the transient responses is
Question 44
Draw the asymptotic magnitude curve of the frequency response of
Solution:
By Bode diagrams:

The magnitude of the frequency response
Question 45
Given a linear system with the transform function
Bode diagram
Find
Solution:
We know that a zero in
Question 46
Given a linear system with the transform function
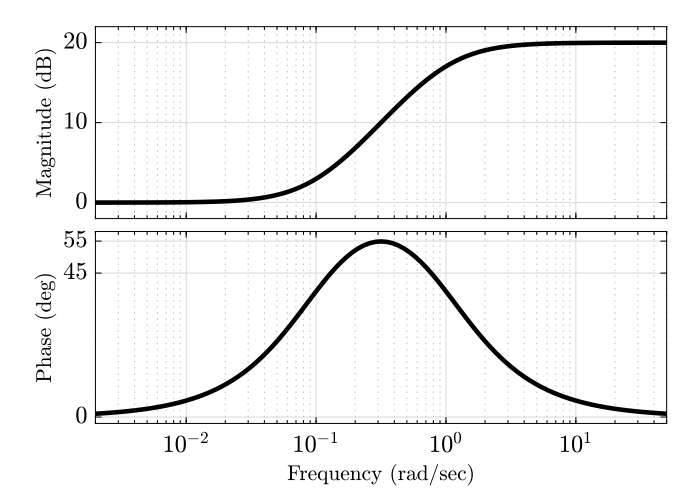
Bode diagram
Find
Solution:
We know from the denominator about the corner frequency
We also know that a zero in
Question 47
Given a linear system with the transform function
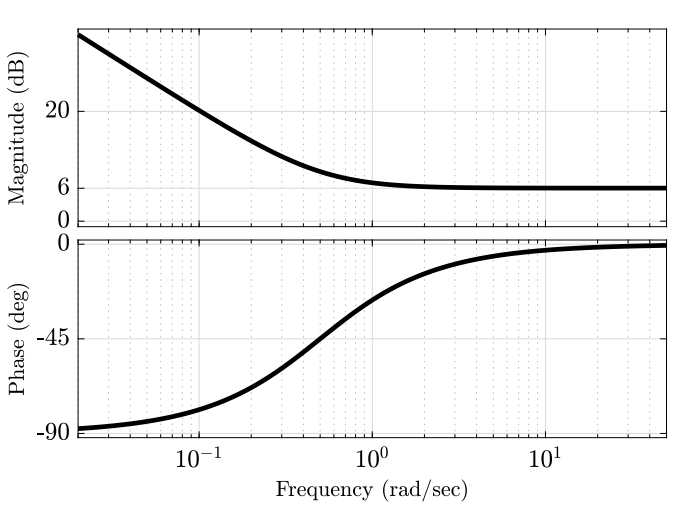
Bode diagram
Find
Solution:
We see from the diagram that it begins with a downward slope. The only system that begins with such a slope is
Since there is a corner frequency at
Question 48
In the following figure are 3 Bode diagrams and 3 polar diagrams. Match them.
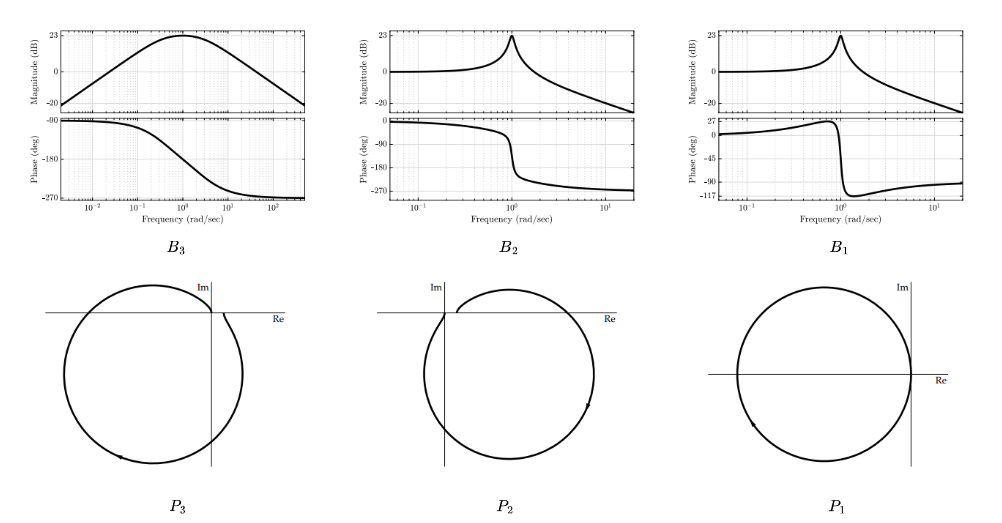
Bode and polar diagrams.
Solution:
We can match the figures by only looking at the phase diagrams of the Bode diagrams.
Question 49
In the following figure are represented an input an output signal of a system -
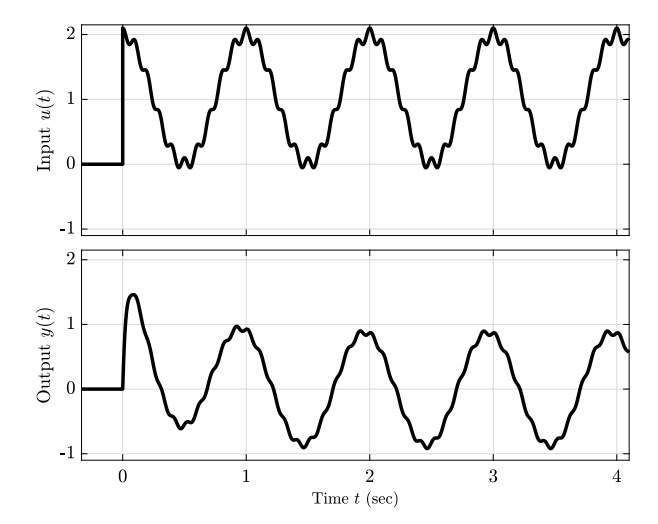
Signals
.
Match the correct Bode diagram:
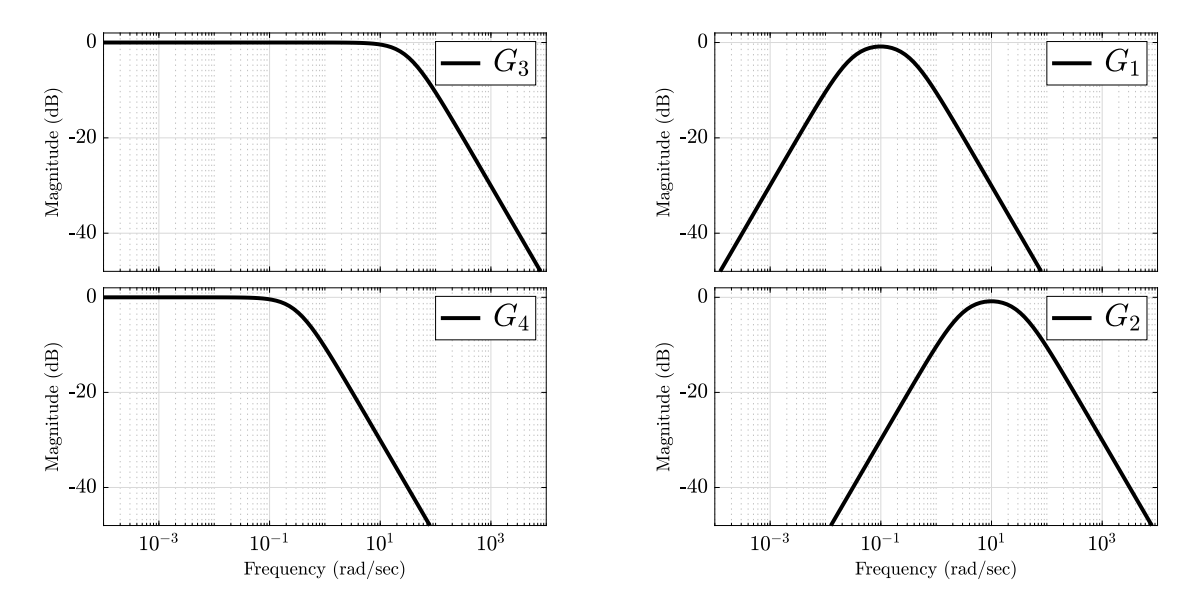
Bode diagrams
.
Solution:
The static magnitude of the input
We also see that the high frequencies in the input have been filtered out, yes the the slower frequency, with
The corresponding frequency of that is
Question 50
The following graph is a polar description of a linear, time-invariant, and stable system. Its steady-state response to the input
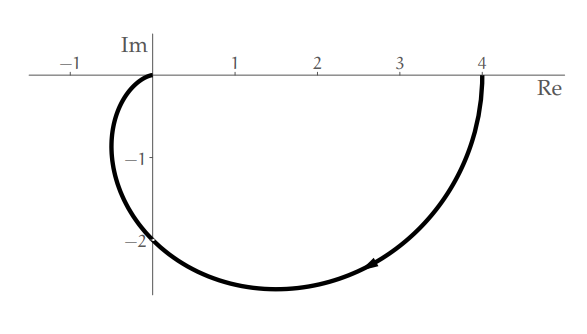
Polar description of a linear system.
Solution:
The input can be decomposed to two different signals:
The steady-state step response is simply (because the system is stable):
For the frequency input
In our case,
Therefore, the total steady-state response is:
Also, we know that the steady-state response is of the form:
Meaning:
From here I don’t really know how to explain. I want to thank from the deepness of my heart to the course instructors that provide clear and coherent explanations to what the fuck is going on with this course.
Question 51
Given the Routh table of the polynomial
\begin{array}{c|ccc}
0 & 1 & 3 & 6 & 2 \
& 2 & 6 & 3 & 1 \
1 & -3 & -9 & 0 \
& 0 & -9 & -3 \
2 & -3 & -9 \
& -9 & -3 \
3 & 24
\end{array}
$$How many roots of
Solution:
Don’t know, don’t wanna know.
Question 53
Is
Solution:
First, we need to find the characteristic equation of
By Cayley–Hamilton we know that
Question 54
Is it possible that:
Solution:
By definition:
We can see that the lower left expression will never amount to zero, therefore the statement isn’t correct.
Question 55
Calculate
By definition:
Question 56
Are the following two system realizations similar?
Solution:
The
Question 57
Are the following two system realizations similar?
Solution:
The
But, the Identity matrix is similar only to itself, therefore
Question 58
Prove that
Solution:
Substituting the solution:
Making sure the initial condition is satisfied:
Question 59
What’s the observer realization of the transfer function
Solution:
By canonical realization:
Question 60
What are the equilibrium points of the system
Solution:
The equilibrium points are where
Therefore the equilibrium point is
Question 61
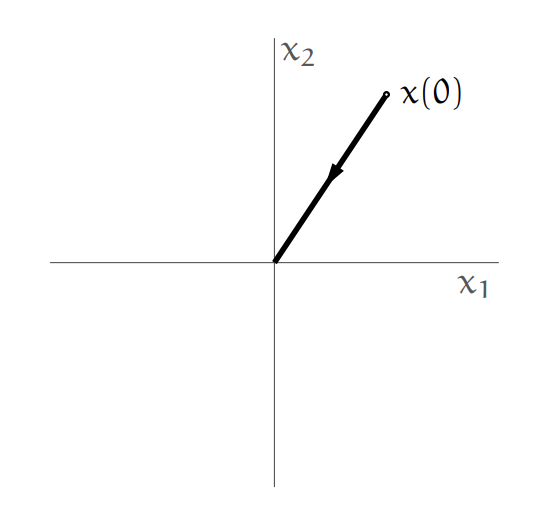
An autonomous response of a second order linear system is shown in the following figure:
Autonomous response of the system.
Is the equilibrium point of the system asymptotically stable?
Solution:
No, we see from the figure that for that initial condition, the state of the system diverges, which means the system isn’t stable.
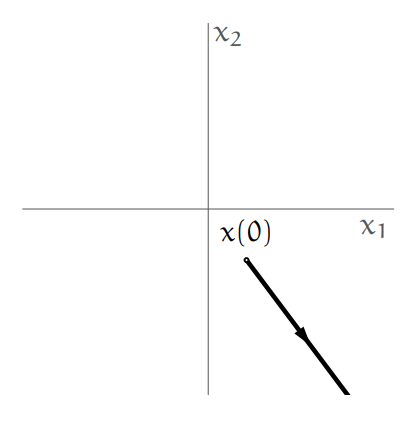
Question 62
An autonomous response of a second order linear system is shown in the following figure:
Autonomous response of the system.
Is the equilibrium point of the system asymptotically stable?
Solution:
For a second-oder system to be asymptotically stable, we need both of the eigenvalues to be negative. From the figure we see that at least one of the eigenvalues is negative, and thus any point on its eigenvector converges to zero. But, we still don’t know anything about the second eigenvalue, which might be positive. Therefore, we can’t say whether the system is stable or not.
Question 63
An autonomous response of a second order linear system is shown in the following figure:
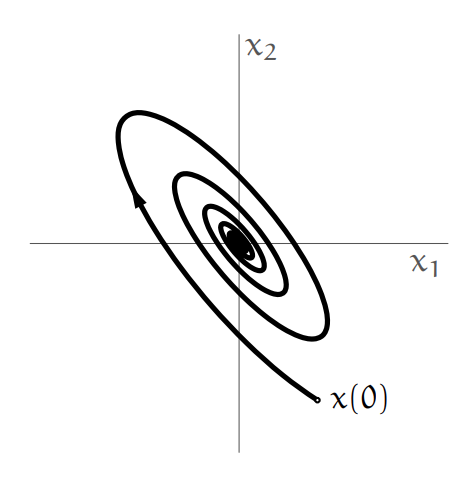
Autonomous response of the system.
Is the equilibrium point of the system asymptotically stable?
Solution:
Yes, we can see from the figure that there exists a circle around the equilibrium point where the system converges to the equilibrium point, which means the system is asymptotically stable.
Question 64
An autonomous response of a second order linear system is shown in the following figure:
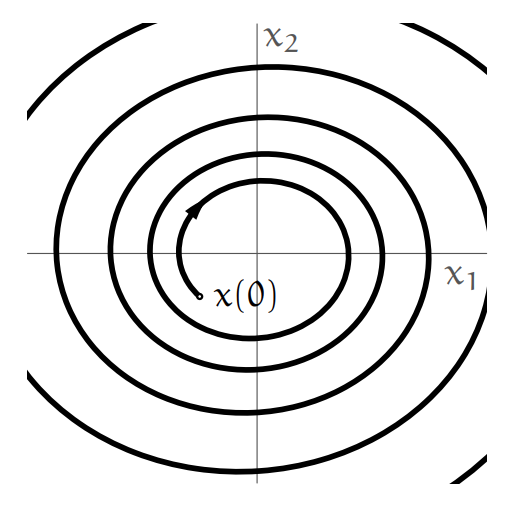
Autonomous response of the system.
Is the equilibrium point of the system asymptotically stable?
Solution:
No, the system clearly diverges from the initial condition outwards.
Question 65
What’s the equilibrium point of
Solution:
We simply need to find where
Therefore:
Question 66
What’s the equilibrium point of
Solution:
Therefore:
Question 67
Given a nonlinear system:
Linearize it around the equilibrium point
Solution:
Derivatives:
Therefore, the linearized system is (where
To find the transfer function, we substitute the second equation into the first one:
Therefore the transfer function is:
Question 68
Is the equilibrium point of the autonomous system
Solution:
Both of the eigenvalues of the system (
Question 69
Is the equilibrium point of the autonomous system
Solution:
Both of the eigenvalues of the system (
Question 70
Given the linearization
Solution:
By Lyapunov’s indirect method, if both of the eigenvalues of the linearized system are on the open left half plane (which is true in our case), than the non-linear system is asymptotically stable, and thus Lyapunov stable, around the equilibrium point.
Question 71
Given the linearization
Solution:
By Lyapunov’s indirect method, If the rightmost eigenvalue of the Jacobian matrix is on the imaginary axis, then the stability conclusion is ambiguous. Therefore, we don’t know.