Introduction
From (Lathi & Green, 2018):
The counterpart of the Laplace transform for discrete-time systems is the
The behavior of discrete-time systems is similar to that of continuous-time systems (with some differences). The frequency-domain analysis of discrete-time systems is based on the fact that the response of a linear, time-invariant, discrete-time (LTID) system to an everlasting exponential
The
We define
where
Symbolically:
Note that
Region of Convergence (ROC)
Definition:
The region of convergence, also called the region of existence, for the the
-transform , is the set of values of (the region in the complex plane) for which the sum converges.
Final and Initial Values Theorems
Theorem:
Given a discrete signal
with , the initial and final value theorems are as follows:
- Initial value theorem:
assuming
exists.
2. Final value theorem:assuming
is converging.
Causality and Stability
Theorem:
If the transfer function
of a DLTI system is rational, then
is causal iff is proper and is -stable iff has no poles in .
Example:
The system
is non-proper. Hence is not causal, but it is stable.
Jury table
Attention:
For the exam, we won’t need to use the Jury table approach. Christian has instead provided the Bilinear Transformation in the cheat sheet, since it is a much nicer to work with Routh table.
Definition:
Given the polynomial
, the associated Jury table is where for each
: (the
-th row has elements). The Jury is said to be:
- regular if all
, and - singular otherwise.
Necessary and Sufficient Condition for Stability
Theorem:
Consider a polynomial in
with :
is Schur iff the associated Jury table is regular and all the elements of the first column are positive. - If the Jury table is regular, then
has no roots on the unit circle and the number of poles outside of the unit circle equals the number of negative elements in the first column of the table. - If the Jury table is singular, then
is not Schur. Is this case, we cannot say anything about the location of the poles, except that there is at least one pole in .
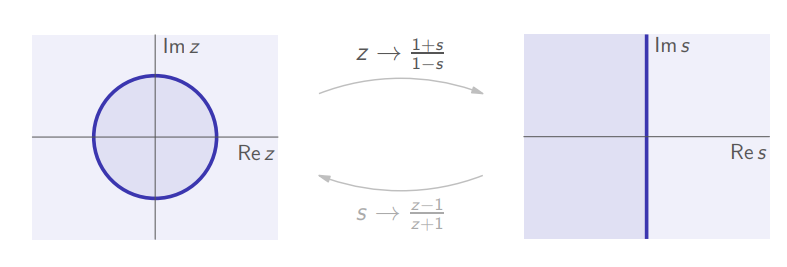
Bilinear Transformation
Theorem:
The transformation
enables to use the transform continuous system for the analysis of the discrete time system, such that:
- for a given transfer function
, is a root of iff is a root of . is Schur iff is Hurwitz.
This transformation basically means:
i.e:
Demonstration of the Bilinear transformation.