Introduction
From (Lathi & Green, 2018):
Because of the linearity property of linear time-invaraint systems, we can find the response of these systems by breaking the input
The tool that makes it possible to represent arbitrary input
We can also separate the input into exponentials of the form
The Laplace Transform
Definition:
For a signal
, its Laplace transform is defined by The signal
is said to be the inverse Laplace transform of . It can be shown that where
is a constant chosen to ensure the convergence of the integral.
This pair of equations is known as the bilateral Laplace transform pair, where
Note that
Region of Convergence (ROC)
Definition:
The region of convergence, also called the region of existence, for the the Laplace transform
, is the set of values of (the region in the complex plane) for which the integral converges.
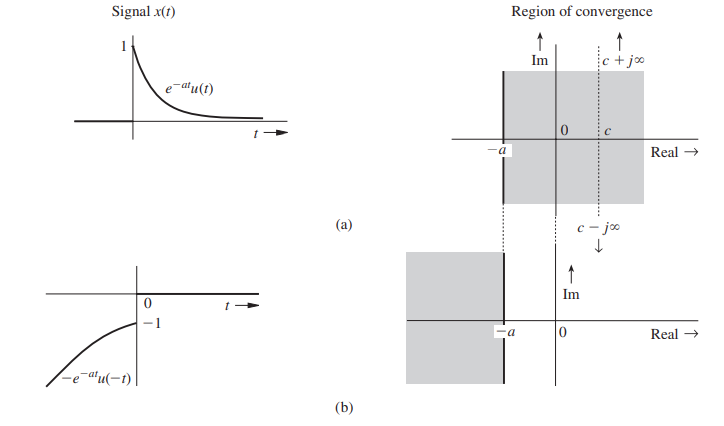
Example: Laplace transform and ROC of a causal exponential
For a signal
, find the Laplace transform and its ROC. Solution:
By definition,Because
for and for , Note that
is complex and as , the term does not necessarily vanish. Here we recall that for a complex number , Now
regardless of the value of . Therefore, as , only if , and if . Thus, Clearly,
Use of this result in our expression for
yields The ROC of
is , as shown in the shaded area in the following figure:
Pasted image 20240718093739b)have the same Laplace transform but different regions of convergence. This face means that the integral defining
exists only for the values of in the shaded region. For other values of , the integral does not converge.
Basic Properties
Note:
The region
means .
| property | time domain | ROC | |
|---|---|---|---|
| linearity | |||
| time shift | |||
| time scaling | |||
| differentiation | |||
| convolution |
Laplace Transform Table
Some more common Laplace transforms:
Partial Fraction Expansion
Note:
This is a generlization of פירוק לשברים חלקיים.
Given a ration proper
we can rewrite the function as
where
For higher order poles we need to do a few tricks like using coefficient comparison.
Final and Initial Values Theorems
theorem:
Given a continuous signal
with , the initial and final value theorems are as follows:
- Initial value theorem:
assuming
exists.
2. Final value theorem:assuming
is converging.
From Laplace to Transfer Function
If
where
In other words, dynamic LTI systems in the Laplace act as the multiplication of the transformed impulse response and input.
Definition:
The function
is called the transfer function of
. Transfer function may also be viewed as the ratio of the Laplace transforms of the output and input signals:
In some important cases (systems described by ODEs) transfer function are of the form of a quotient of two polynomials, like
for some
The system is said to be
- proper if
, - strictly proper if
, - bi-proper if
, - non-proper if
.
Steady-State and Transients
Consider a continuous-time LTI
The Laplace transform of the step response (response to
Which we can also write as:
- The signal
is called the transient response. It Laplace transform is rational, proper, and its singularity at is removable, as in: Hence, is a superposition of decaying exponents and , meaning that the transient response vanishes asymptotically. - The signal
is called the steady-state response, where is called the static gain of .
Thus, the step response of a stable LTI systemconverges asymptotically to the step signal scaled by its static gain : Note:
We refer to
as the static gain of in the unstable case as well. If is finite, then we may still think of as the steady-state response of an unstable system. However, the transients do not decay then (might even diverge).
Practically:
- Steady-state response shows what the response will eventually be, i.e:
- what is the temperature in a thermometer,
- what floor an elevator reaches,
- what position the pointer of a spring scale stops.
- Transient response shows how the steady state is reached.
- how fast a thermometer catches the ambient temperature,
- how fast and smooth an elevator moves between floors,
- how fast the pointer of a spring scale stops.
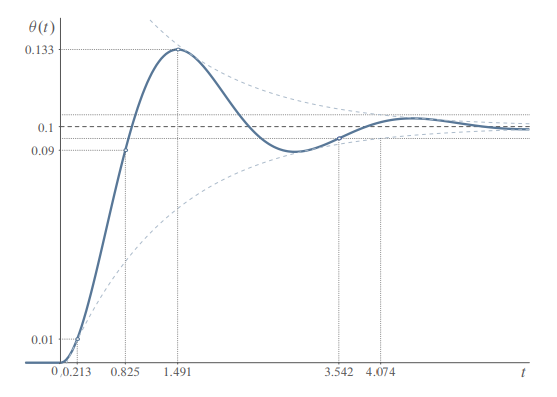
Characteristics of Transients
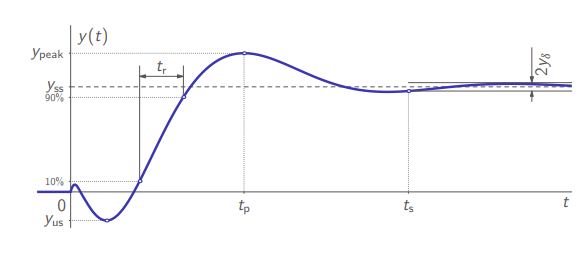
General step response of a stable LTI system
Smoothness of transients may be measured by the:
- overshoot,
where is the highest peak in the direction of . - undershoot,
where is the highest peak against the direction of .
Speed of transients may be measured by the
- rise time,
- time that takes to rise from to . - peak time,
- time that takes to reach its highest peak.
Duration of transients may be measured by the
- settling time,
- the smallest such that ,
for a given settling level, which is usually or .
First Order System Transfer Function
The transfer function of a general first-order system takes the form
where
For an step signal input
Taking the inverse Laplace transform of it would yield:
Just like RC circuits.
The static gain
respectively. The time constant
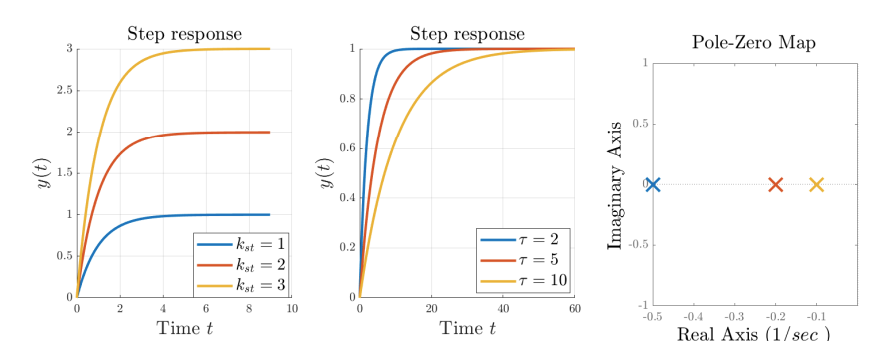
Characteristics of a first-order system.
In steady-state, the response becomes constant:
The transient response is shaped mainly by
By the initial value theorem, the slope in the beginning is:
which means:
Second Order System Transfer Function
The transfer function of a general second-order system takes the form
where
Its step response would be:
and the roots of its denominator are
Three cases shall be studied separately:
- if
, then are real and simple, which we will call overdamped. - if
, then are real and equal, which we will call critically damped. - if
, then and complex conjugate, , which we will call underdamped.
Note:
If
, then we say that system is undamped; on need in a separate analysis.
In all cases the initial slope is (by the initial value theorem):
which means:
Step response of an overdamped second order system:
The step response in this case is
where
Increasing
Overdamped second-order system.
Step response of a critically damped second order system:
In this case the poles
Increasing
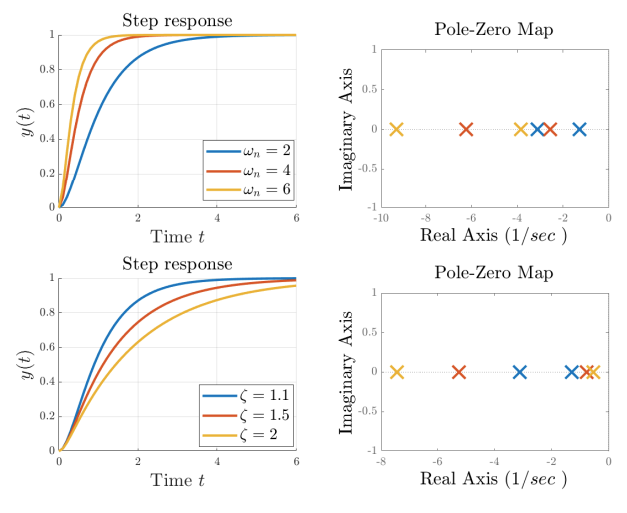
Step response of an underdamped second order system:
In this case the poles
where
We can notice that the response is composed of an exponential decay with
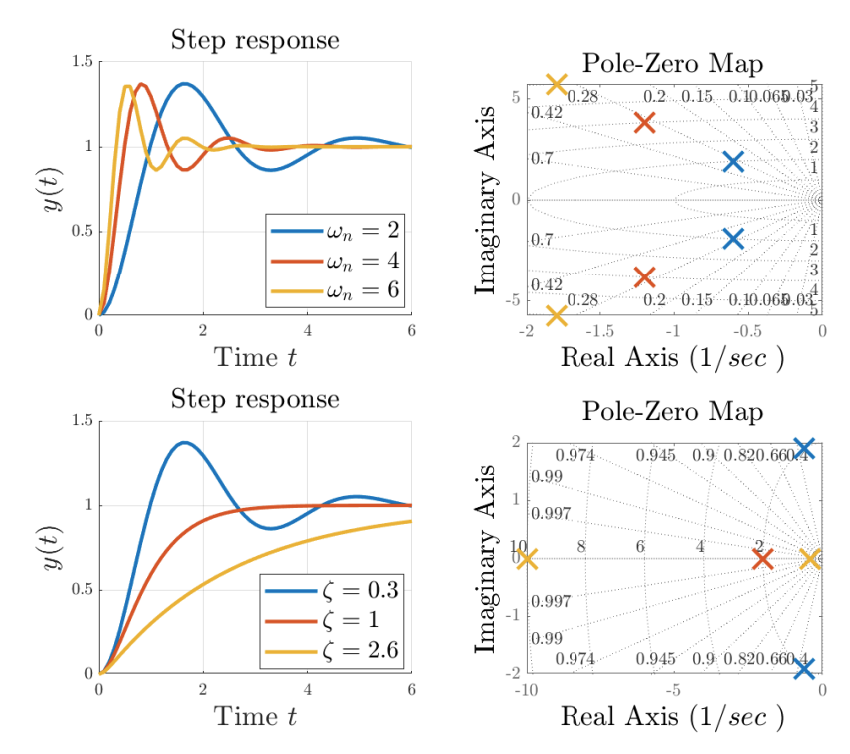
Upper plots: underdamped second order system
. Lower plots: Underdamped ( ), critically damped ( ), and overdamped ( ) systems, where .
Step response of underdamped system - effect of zeros:
Let
for
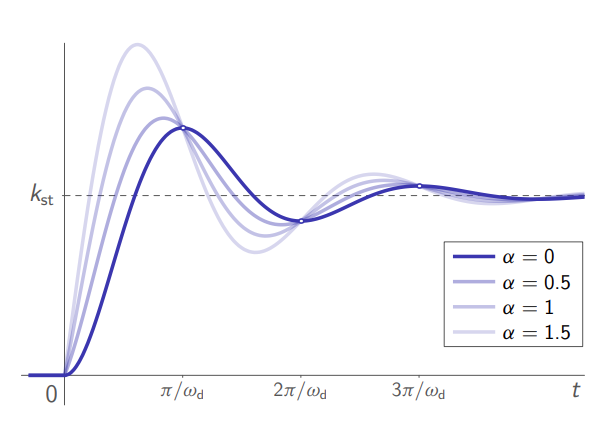
Effect of zero on an underdamped system.
As
- the overshoot
increases: for , since for , - the raise time
decreases, - the settling time
increases.
Causality and Stability
Theorem:
A continuous-time LTI system with rational transfer function
is causal and I/O stable iff
is proper and has all its poles in the open left half plane
Categorizing Polynomials
In the case that our LTI system is represented by a rational function, the stability is determined by the locations of the roots of the denominator. It is not always easy to calculate these, but there are ways to test whether all the roots lie in the open left half plane, or in the open unit disk
Definition:
A polynomial is said to be
- Hurwitz if all its roots are in the open left half plane.
- Schur if all its roots are in
. - Monic if the leading coefficient
, like
Routh Table
Definition:
Given the polynomial
the associated Routh table is
where for each
: and if the last required column of an involved row is empty,
is taken.
According to what happens to the elements in the first column, we say that the Routh table is
- singular if there exists an
where: - regular if for every
:
Necessary Condition for Stability
Theorem:
The polynomial
is Hurwitz only if
for all . In general, for polynomials that are not monic, we require that all coefficients are non zero and have the same sign.
Necessary and Sufficient Condition for Stability
Theorem:
Consider a polynomial
is Hurwitz iff the associated Routh Table is regular and all the elements of the first column have the same sign. - If the Routh table is regular, then
has no imaginary roots, and the number of poles in equals the number of sign changes in the first column of the table. - If the Routh table is singular, then
is not Hurwitz. In this case, we cannot say anything about the location of the poles, except that there is at least one pole on the imaginary axis, or in .
Second order polynomial: The Routh table for a second order polynomial
Thus, for
Third order polynomial: The Routh table for a third order polynomial
Requiring that all elements in the first column have the same sign leads to the following condition for
are nonzero and have the same sign and .
Exercises
Question 1
Consider the signal
signal
defined as
with
Part a
Find the Laplace transform of
Solution:
By definition:
Therefore
and its ROC is
Part b
Find the Laplace transform of
Solution:
We need to find:
Using the Laplace Transform Table, we know that:
In addition, using time shift property
and linearity, we get:
Therefore
and its ROC is
Question 2
Consider the following mass-spring-damper system in the following figure:
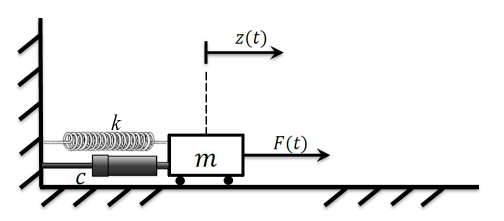
mass-spring-damper system
with:
We suppose zero spring force at
which is equivalent to
Part a
Find the solution to the problem, i.e. the position of the mass in time, for the given input force
Solution:
First, we apply the Laplace transform to the ODE, using the differentiation property and table:
substituting the parameter values:
We want to separate this fraction to elements we can apply the inverse Laplace transform to. we can do so using partial fraction expansion:
where
We get:
Therefore:
Again, using the Laplace transform table in the inverse direction, we get:
The system response
Part b
What is the position of the mass after infinite time?
Solution:
Using the final value theorem, we can find that:
Therefore:
Question 3
Consider the system
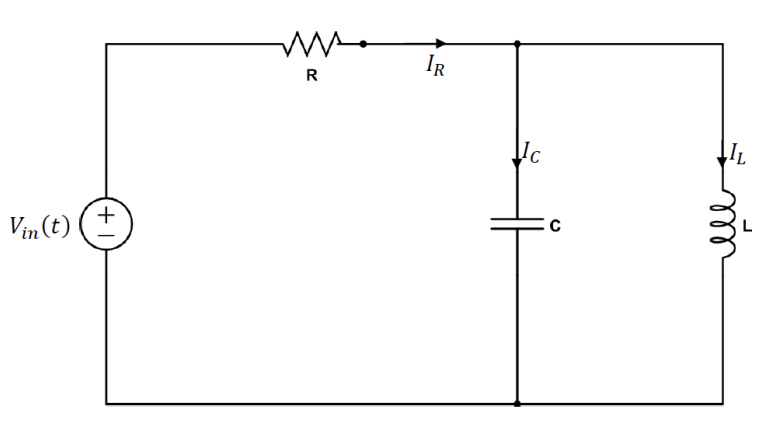
RLC circuit
In other words, the input is the applied voltage
Part a
Write the transfer function
Solution:
By Kirchhoff’s voltage law,
It is known that
Hence,
Applying Laplace to both equations:
By Kirchhoff’s current law:
from which:
Hence, the transfer function is:
Substituting parameters, we get:
Part b
Determine if the system is proper, strictly proper, bi-proper, or non-proper.
Solution:
In our case,
Part c
Find the zeros and poles of
Solution:
- The zeros:
- The poles:
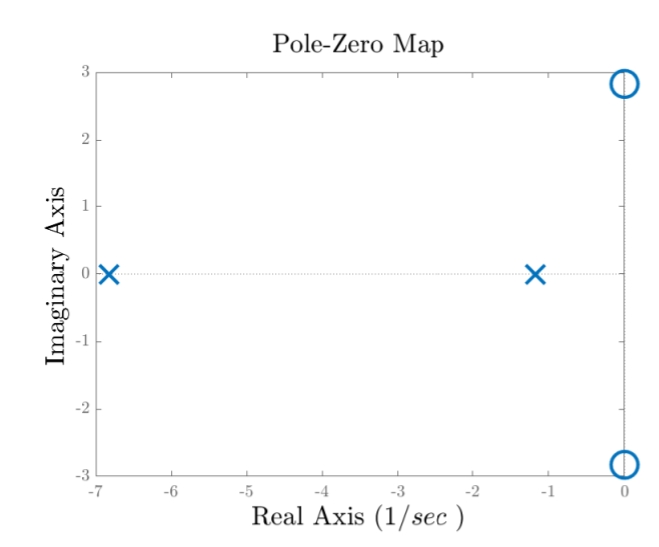
Pole-zero map. Circles mark zeros, while crosses mark poles.
Part d
What is the system’s steady-state value for step input
Solution:
By the final value theorem:
In our case:
Substituting back:
we get:
Question 4
Consider the system
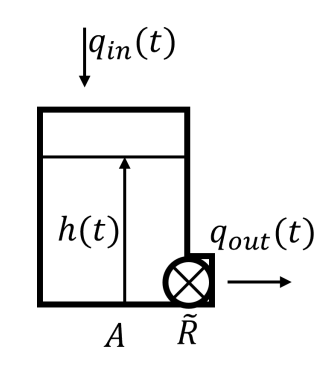
Tank system
Its input is the volumetric flow
Part a
Derive the transfer function
Solution:
The liquid level at any point in the tank is simply the volume of the liquid per cross section area:
We know that
We can rearrange this equation to a standard form:
Applying the Laplace transform, we get:
This transfer function is strictly proper.
Part b
Find the zeros and poles of
Solution:
The system has no zeros, and we can see that
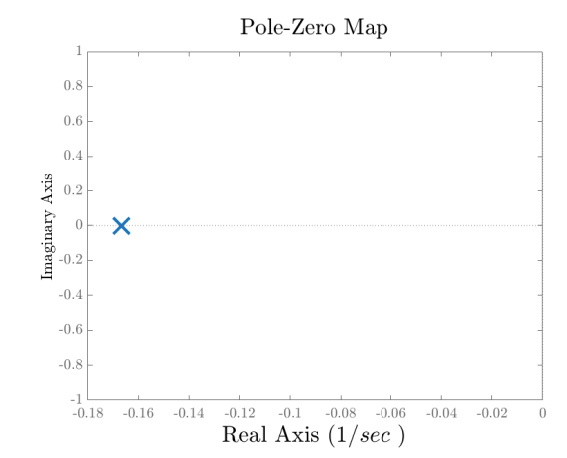
Pole-zero map of the tank system.
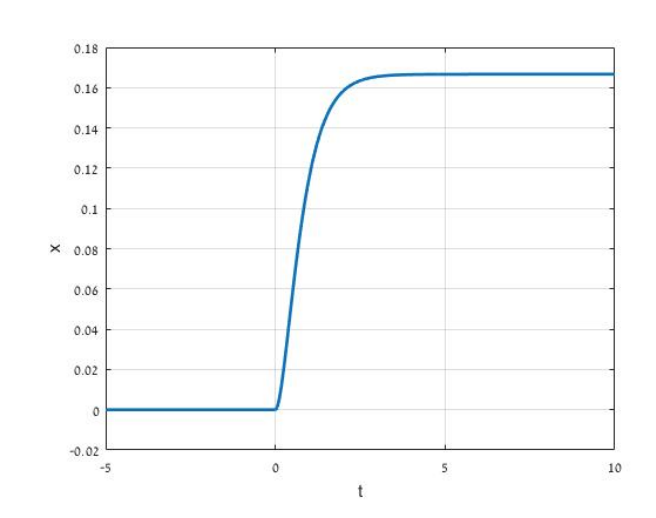
Part c
Calculate the plot and response of the step input
Solution:
Using the assumptions, we can write our transfer function as:
We know from steady-state of a first-order system that:
And the initial slope is:
In general, the step response is:
To find when it reaches
In the same way, for
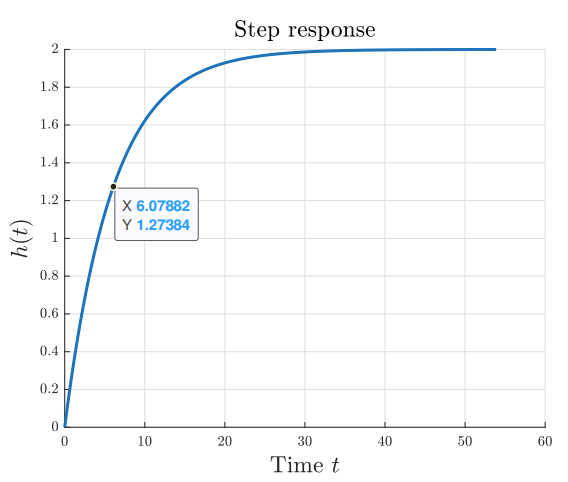
Step response of the tank system.
Question 5
Consider the system
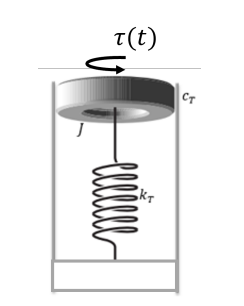
Rotational mass-spring-damper system
The mass whose moment of inertia,
Part a
Derive the transfer function
Solution:
By angular momentum balance equation:
Applying the Laplace transform to both sides of the equation yields:
We can rewrite it to fit the known form:
Part b
Determine if the system is strictly proper, bi-proper, non-proper.
Solution:
The system is strictly proper.
Part c
Find
Solution:
We know that:
Therefore, the natural frequency:
And the static gain:
The damping ratio:
Since
Its poles:
These poles are on the open left half plane, which means the system is stable:
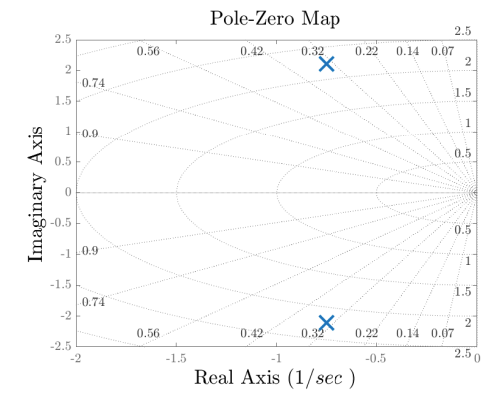
Pole-zero map of the rotational system.
Using super powers like MATLAB we can also plot the step response:
Step response of the rotational system.
From the plot, we can calculate the characteristics of the transient response:
Question 8
Consider the continuous-time LTI system with transfer function
Is this system I/O stable?
Solution:
According to Necessary and Sufficient Condition, We need to make sure that the Denominator’s coefficient satisfy
Question 9
Consider the continuous-time LTI system with transfer function
Is this system I/O stable? If not, then where are the poles placed?
Solution:
All the coefficients of the denominator have the same sign, which means the system might be stable. The associated Routh table:
Since one of its elements in the first column doesn’t have the same sign as the rest,
Because the Routh table is regular, there are no poles on the imaginary axis, and because there are two sign changes in the first column, we must have two poles in the right half plane
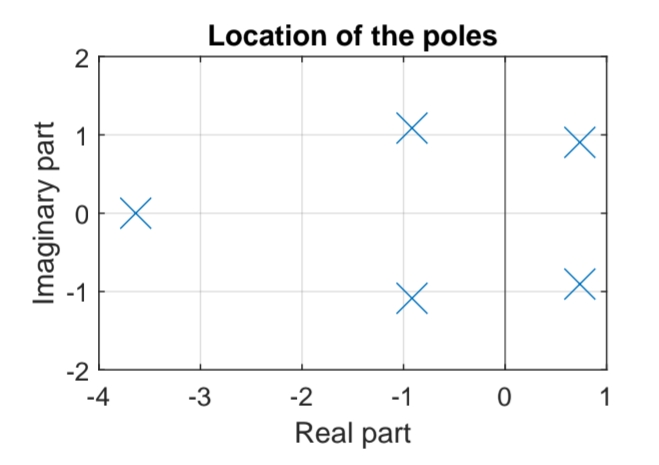
Pole-zero map of
Question 10
Consider the following system:
![]()
Inverted pendulum with torsion spring.
An inverted pendulum with length
The transfer function of the linearized system is given by
When is this system I/O stable?
Solution:
The transfer function is proper. Because we are working with a second degree polynomial, the criterion for stability is that all coefficients of the numerator have the same sign. In this case, all coefficients must be positive:
The first two conditions are always met. Therefore, the condition for stability becomes:
What this means intuitively is that the force of the spring (