Frequency Response
Theorem: Frequency Response Theorem
Let
be a stable CLTI system. Its response to the sinusoidal test input such that in steady state, is also sinusoidal. Specifically:
where
is the gain (magnitude), and is the phase of the frequency response of .
The gain and the phase of the frequency response of
where
Bode Diagram
The Bode diagram is a way of visualizing
Real and Asymptotic Bode Diagram
The Bode diagram’s horizontal axis is the frequency
We also define
Steps to Create an Asymptotic Diagram
-
Decomposing the system into the product of sub-system.
Where each one of these subsystem
are first and second order systems of the form: -
Every first order system of the form
we convert to where
stands for static gain. Every first order system of the form we convert to In the same way, we convert second order systems of the form
to and second order systems of the form
to -
We unite all the static gains by multiplying all
elements, getting: Where
are the standard transfer functions. -
Using the figures below, we draw the asymptotic Bode diagram of the system as a combination of the Bodes of the standard systems.
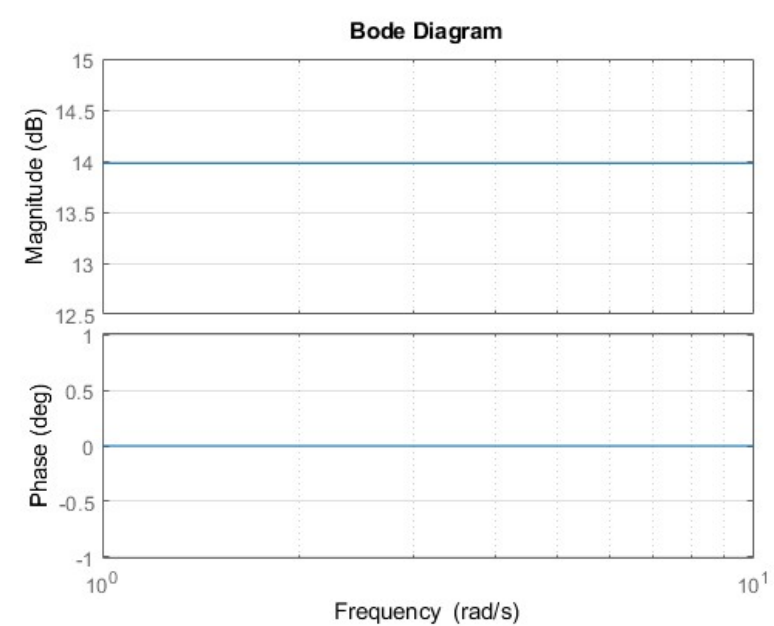
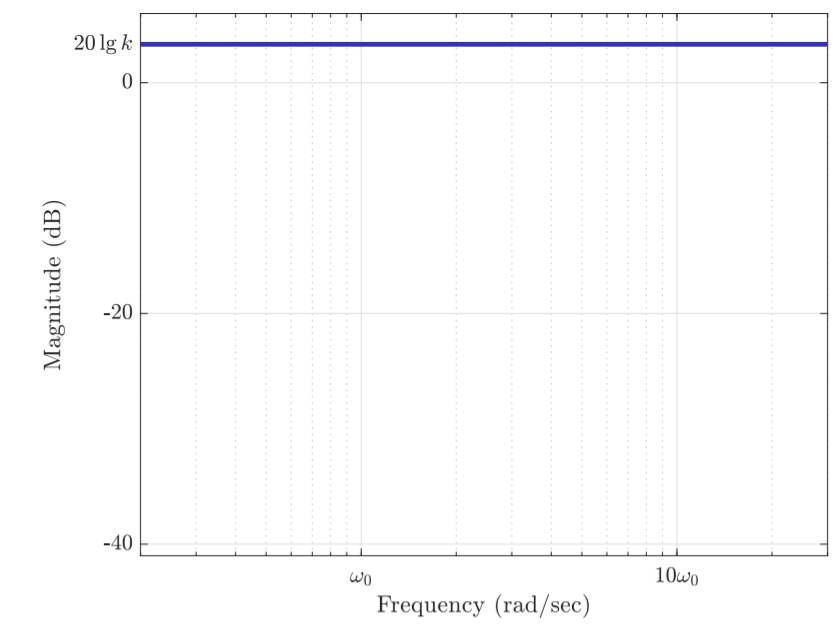
Bode diagram for
. The magnitude is a straight horizontal line with a constant gain of . The phase is .
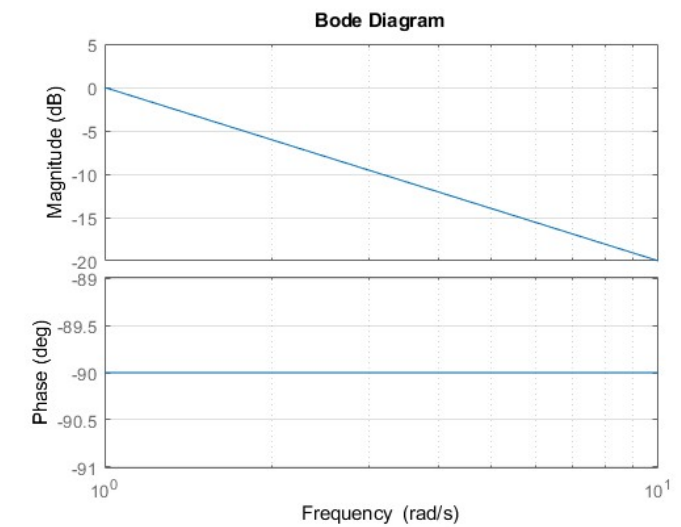
Bode diagram for
. The magnitude is a straight line that crosses the horizontal axis at and has a slope of . The phase is constant at .
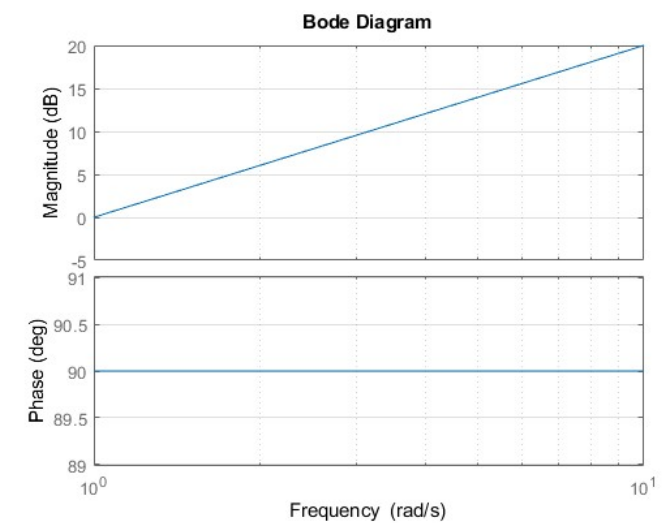
Bode diagram for
. The magnitude is a straight line that crosses the horizontal axis at and has a slope of . The phase is constant at .
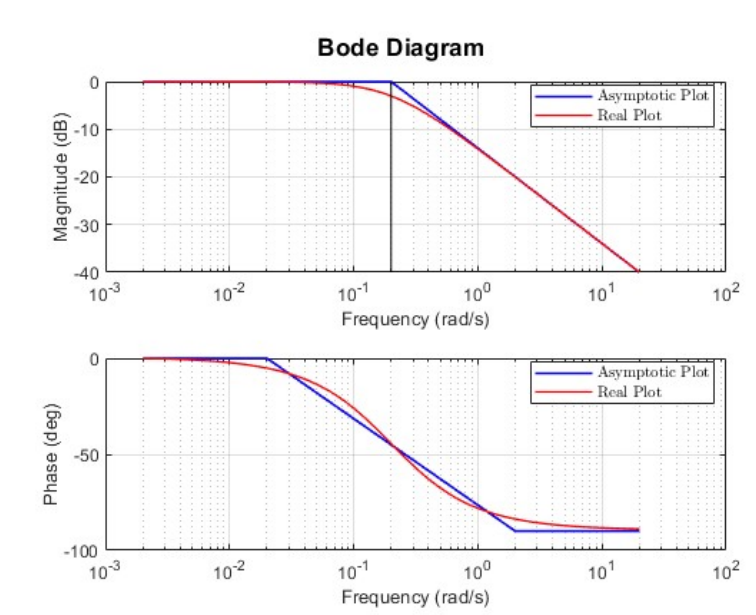
Bode diagram for
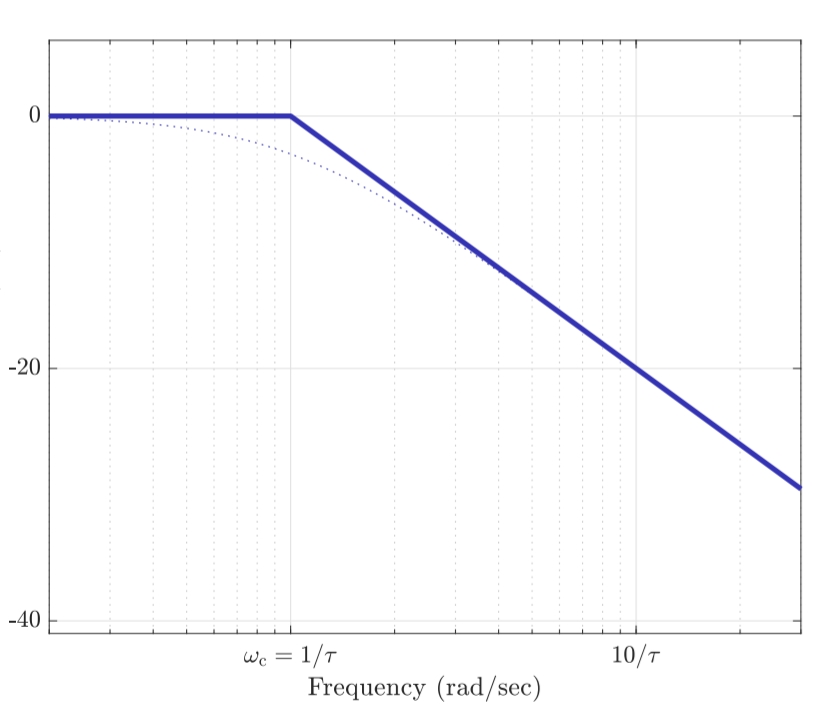
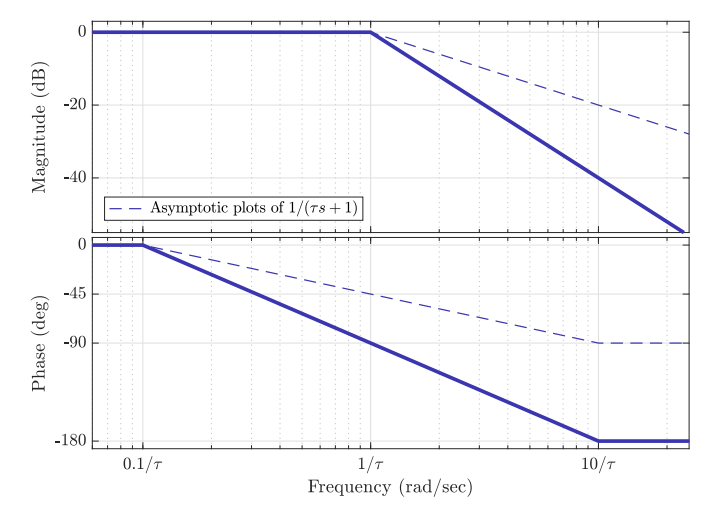
. The magnitude is constant at until the corner frequency of , after which it is a straight line with slope .
The phase is constant atuntil after which it is a straight line that crosses at a frequency , and at again constant at .
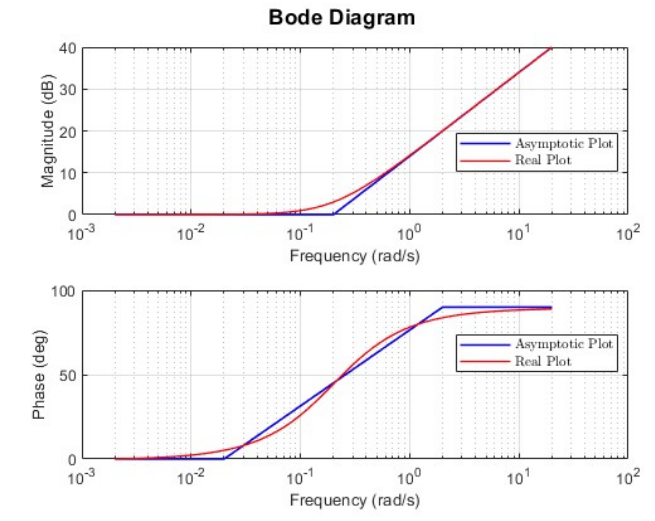
Bode diagram for
. The magnitude is constant at until the corner frequency of , after which it is a straight line with slope .
The phase is constant atuntil , after which it is a straight line that crosses at frequency , and at again constant at .
General Guidelines for Asymptotic Bode
- Each pole adds
to the magnitude’s slope (over high frequencies). - Each zero adds
to the magnitude’s slope (over high frequencies). - Each pole in
adds a phase lag of . - Each pole in
adds a phase lag of . - Each zero in
adds a phase lag of . - Each zero in
adds a phase lag of .
Polar Diagram
The polar diagram is another way to represent the frequency response of the system. Similarly to the Bode diagram, the polar diagram shows
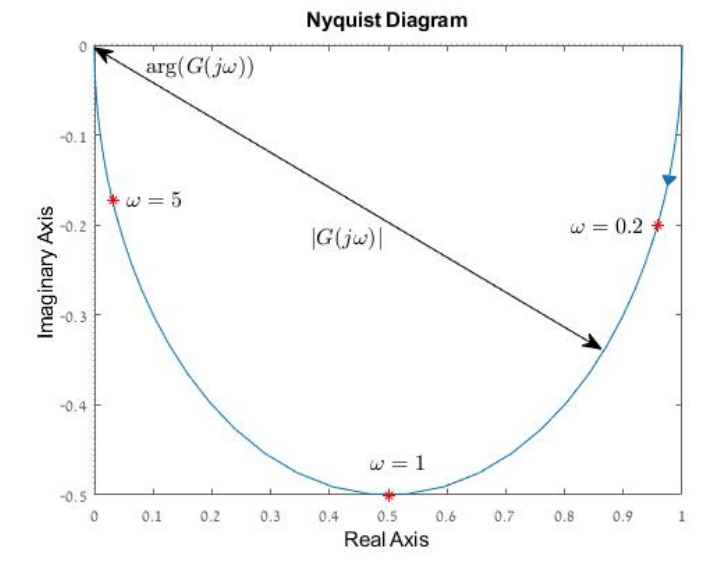
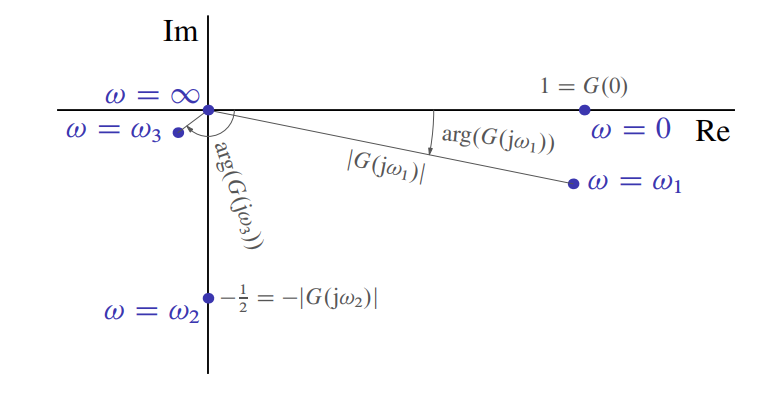
Polar diagram of
.
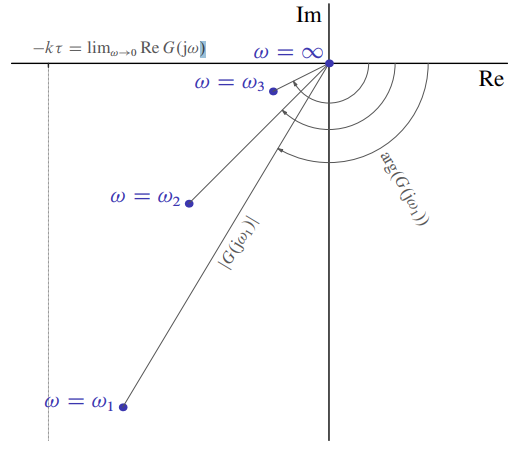
Similarly to the Bode diagram, we can extract the magnitude and phase of the system for a given frequency from the polar diagram. But, here we do not know the actual frequency. The magnitude at a given point
When looking back at the Bode diagram of the first system showcased, we see that the magnitude decreases monotonically. This can also be seen in the polar diagram as the distance from the origin decreases until it reaches
Filters
Using the frequency response we can design filters to shape the spectra of signals. 4 categories of filters are generally used:
- Low-pass Filters: filters that pass signals with a frequency lower than a selected cutoff frequency
, and attenuate signals with frequencies higher than the cutoff frequency. - High-pass Filters: filters that pass signals with frequency higher than a certain cutoff frequency
and attenuate signals with frequencies lower than the cutoff frequency:
$$
\lvert G(j\omega) \rvert\geq \dfrac{1}{\sqrt{ 2 }}\iff\omega\geq \omega_{c} - Band-pass Filters: filters that pass frequencies within a certain range and attenuate frequencies outside that range.
- Band-pass Filters: filters that pass frequencies outside a certain range and attenuate frequencies in that range.
Exercises
Question 1
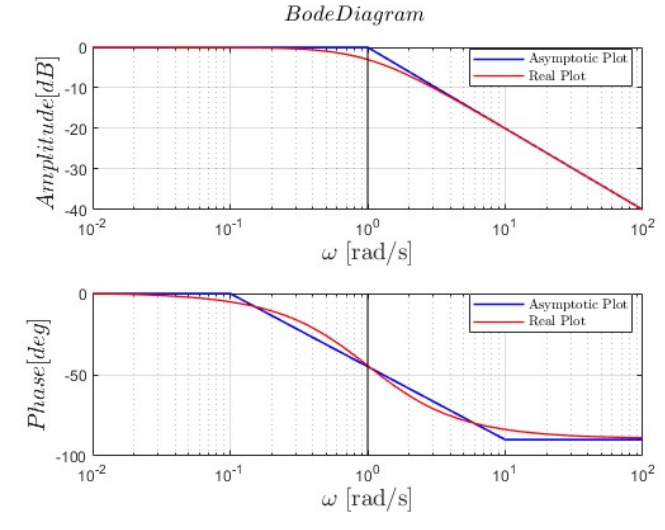
Draw the asymptotic Bode magnitude plots of the transfer function
where
Solution:
We can decompose
where:
The transfer function
Bode diagram for
The two other transfer functions are first-order transfer functions with the unit static gain of the form
Bode diagram for
.
Because we are in a logarithmic graph, the magnitude plot of
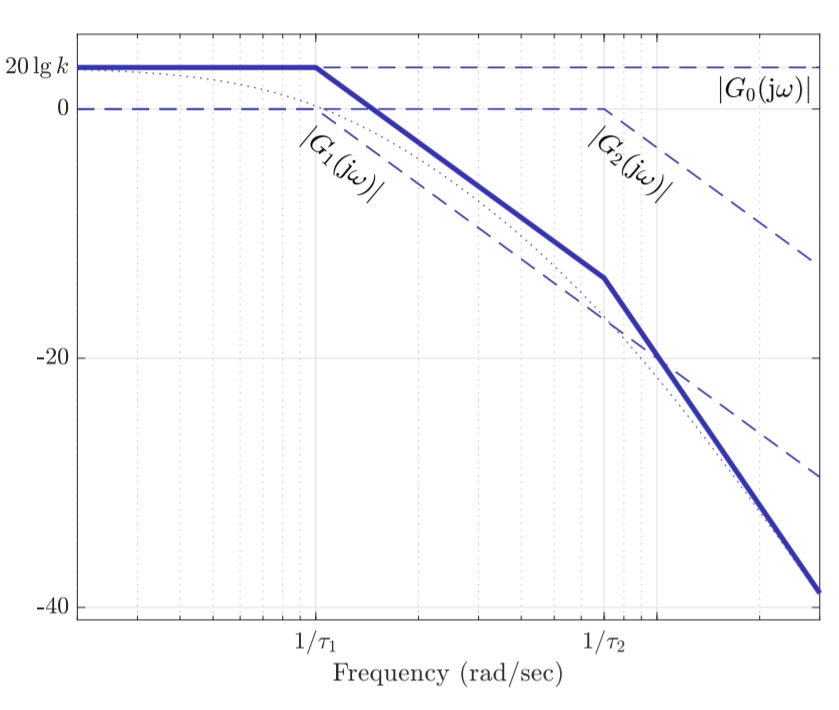
Bode diagram for
; dotted lines correspond to actual Bode plots.
Question 2
Draw the Bode and polar plots for the following transfer functions:
Part a
Solution:
Let us see what happens at specific frequency points
Therefore:
Asymptotic Bode diagram of
.
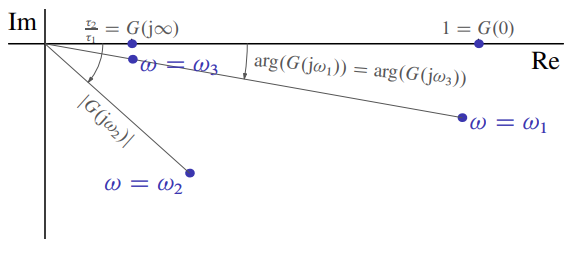
Several points of polar plot of
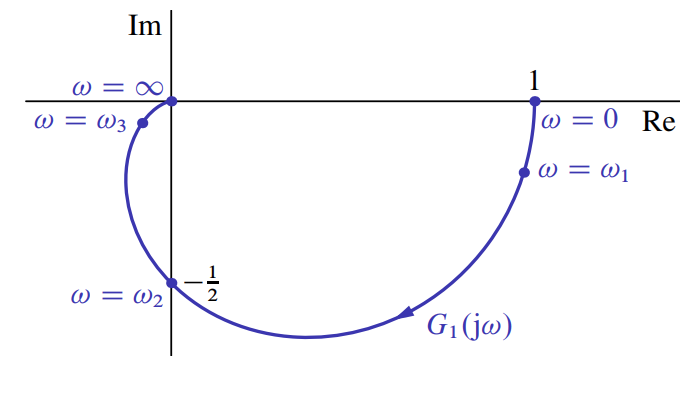
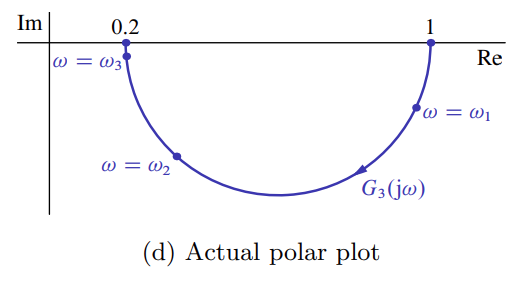
Actual polar plot of
Part b
Solution:
The steps here are similar to those taken in the previous system.
Therefore:
Asymptotic Bode diagram of
Several point of polar plot of
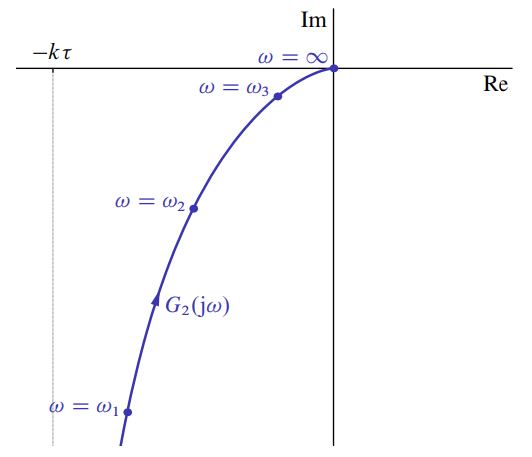
Actual polar plot of
Part c
For
Solution:
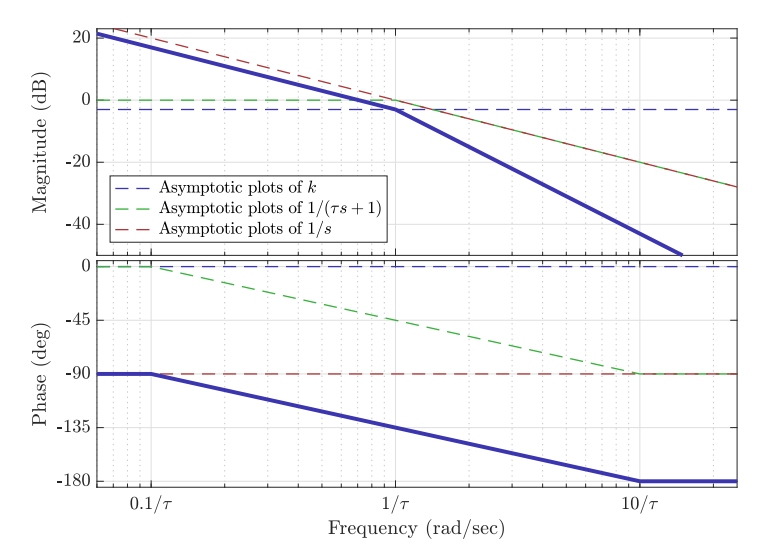
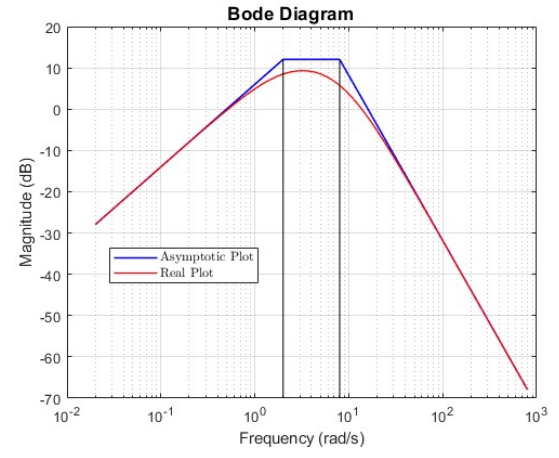
This transfer function can be presented as
which is the cascade of a first-order system and the inverse of another first-order system. Their asymptotic plots of the former are in shown Steps to Create an Asymptotic Diagram. The form of the convolution of such plots depends on the relation between
- If
, the effect of the zero precedes that of the pole (as increases). Hence, the magnitude start at (this is the static gain), then get up at , and then becomes flat again at .
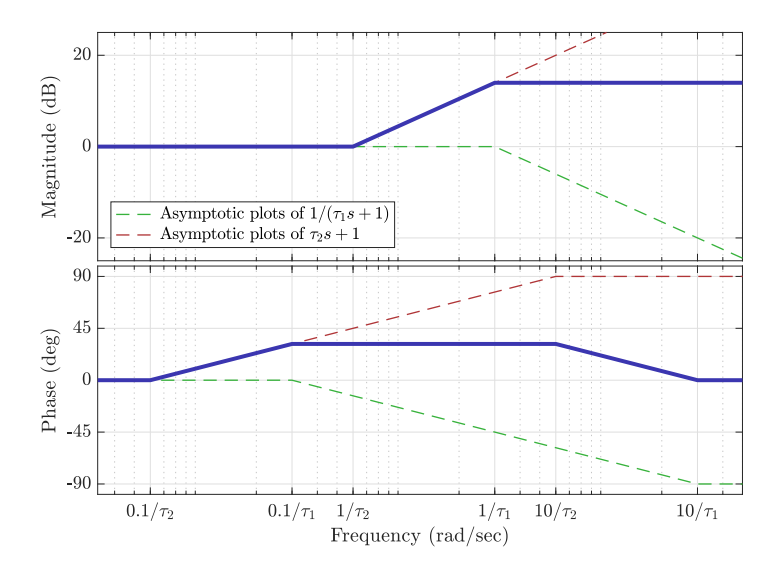
Asymptotic Bode diagram of
for .
To construct the polar plot:
Therefore:
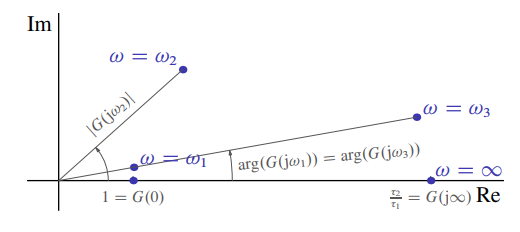
Several points of polar plot of
for .
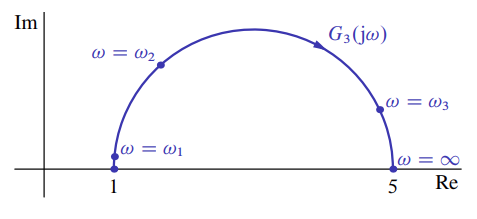
Actual polar plot for
for
- If
, the effect of the pole precedes that of the zero (as increase). Hence, the magnitude starts at (this is the static gain), then gets down at and then become flat again at .
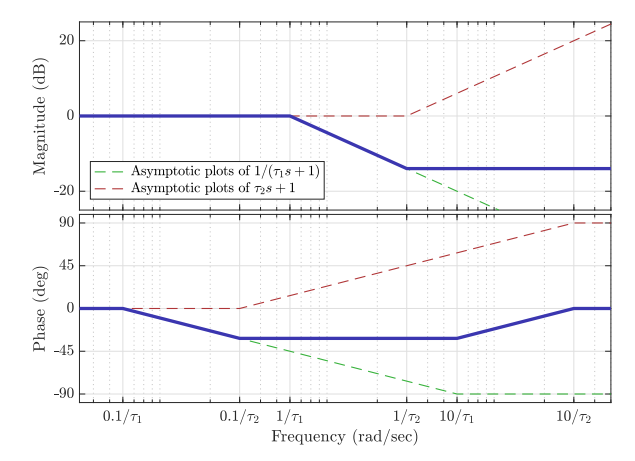
Asymptotic Bode diagram of
for .
We can construct the polar plot in a similar manner to the previous case.
Several points of polar plot of
for .
Actual polar plot for
for .
Question 3
A signal
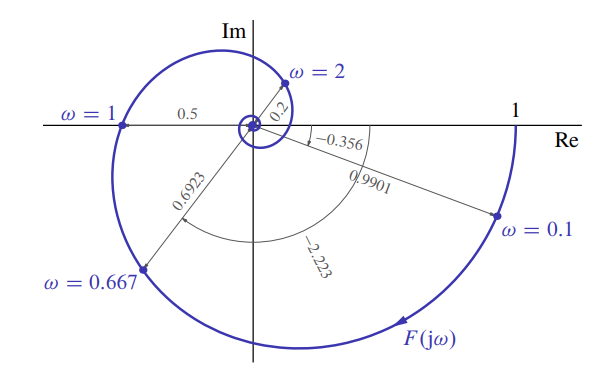
Polar plot of
.
The magnitude
Part a
Find
Solution:
By the Frequency Response Theorem:
In our case,
Part b
Find
Solution:
In this case, we can simply sum the the frequency response of each sinusoid. For
For
Therefore, resulting output signal is:
Part c
In what frequency range harmonic
Solution:
For the harmonic
Question 4
Three sensors,
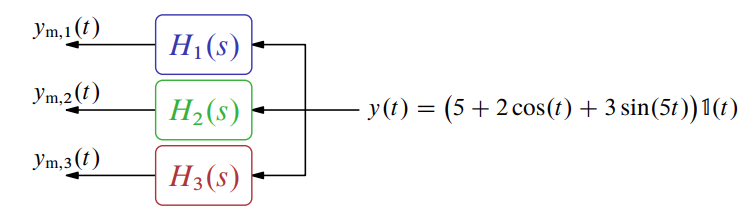
Block diagram of the systems.
The results (measurements) were saved, see parts of them, in the time interval
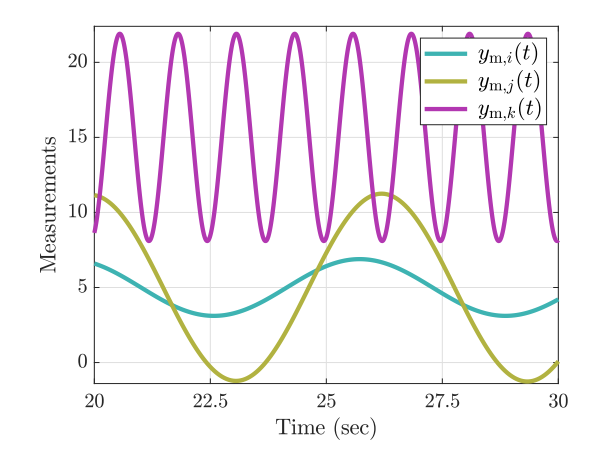
Measurements in the time interval
.
)Unfortunately, the information about what sensor each measurement belo 17 to got lost. Fortunately, we still have frequency response plots of each sensor:
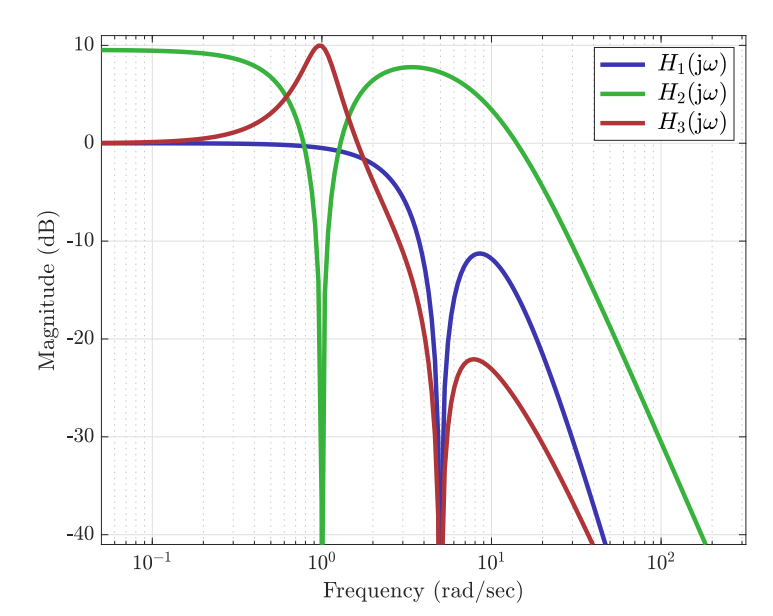
Sensor frequency responses.
Use it to reconstruct the lost information.
Solution:
All measurements are already in steady state. By the Frequency Response Theorem, the steady-state response of the
The
line, which belongs to
Now, both
Question 5
Given is a system represented by an ODE:
and the input:
Find the system response in steady state to the input
Solution:
We perform the Laplace transform on the the ODE:
thus, the transfer function of the system is:
The poles of the system are
- The system is stable, so in steady state the impulse response decays to zero:
- For the same reason, the step response converges to the static gain:
- Due to the Frequency Response Theorem, the response to a sinusoidal input will converge to a sinusoidal signal:
Let’s find : Which is why:
Summing all the responses, we get:
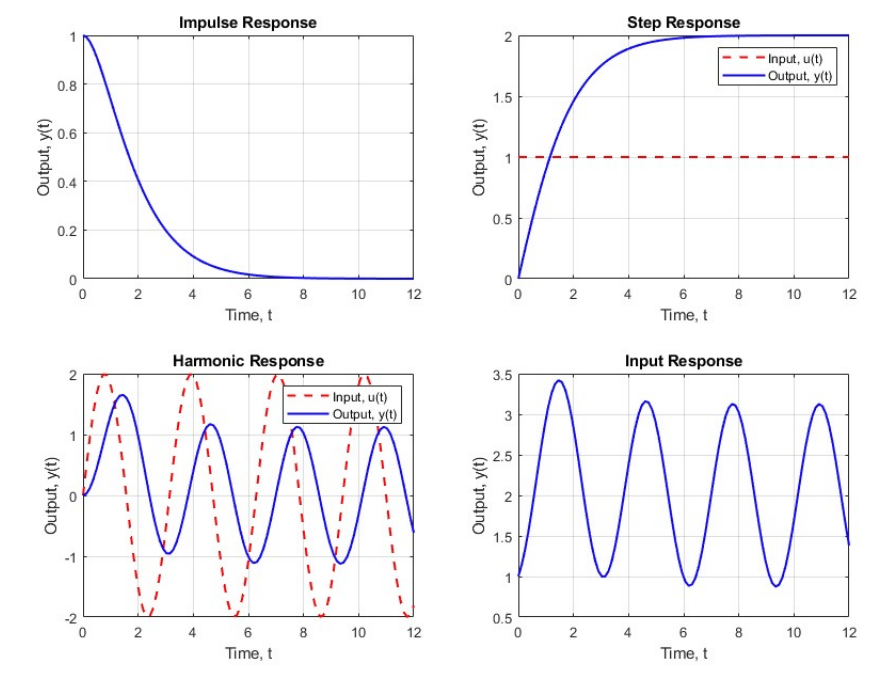
Plots for the different responses that make up
.
Question 6
Given is the below transfer function:
Plot the asymptotic magnitude Bode diagram.
Solution:
We first unpack the system into its basic first and second order subsystem:
We now transform each of the subsystem into their standard form:
We now have 4 subsystems:
We can now analyze each of the subsystems separately:
-
The first system is a static gain:
Its magnitude is
.
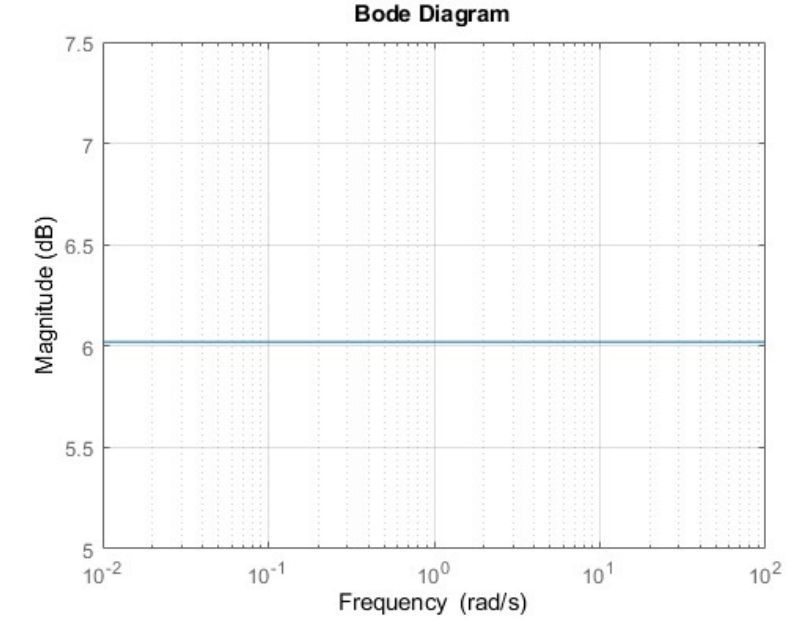
Asymptotic Bode diagram of
. - The second system is a differentiator:
\lvert {G}_{2}(j\omega) \rvert=\omega
so the magnitude in
will be: It has a slope of
after the corner frequency of .

Asymptotic (and real) Bode diagram of. - The second system is a differentiator:
-
The fourth system is also a Low-pass filter but of order
. Similarly, we get a gain of: The slope of the system after the corner frequency of
, is .
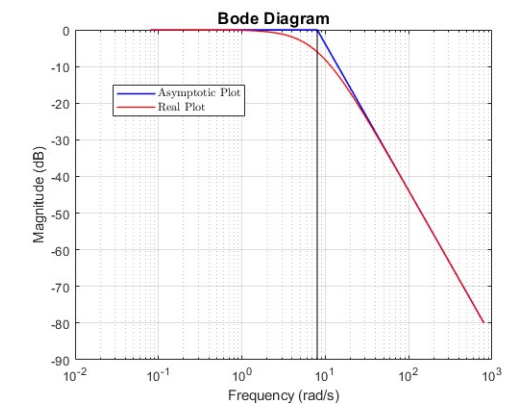
Asymptotic (and real) Bode diagram of
.
We can now cascade all the asymptotic Bodes and get the asymptotic Bode of the original system:
Asymptotic (and real) Bode plot of the
.