Lyapunov Stability
Autonomous System
Definition:
A system of ODE’s which does not explicitly depend on the independent variable is called an autonomous system.
In the case of linear state-space equation, we get:
which is the state equation with zero inputs. It is also known as the unforced motion (or autonomous motion) of the system, where the state responds only to initial conditions.
the unforced motion fully represents properties of the system, while being easier to analyze.
Stability of Autonomous System
Definition:
Consider the following autonomous CLTV system:
An equilibrium
of this system is said to be:
- Lyapunov stable if for every
there is such that if , then:
- asymptotically stable if it is Lyapunov stable and there is
such that if , then:
Conceptually, the meanings of the above terms are the following:
- Lyapunov stability of an equilibrium means that solutions starting “close enough” to the equilibrium (within a distance
from it) remain “close enough” forever (within a distance from it). Note that this must be true for any that one may want to choose.
- Asymptotic stability means that solutions that start close enough not only remain close enough but also eventually converge to the equilibrium.
The region of attraction of an asymptotically stable equilibrium is the set of initial conditions
Stability for Linear State Space Models
Theorem:
An equilibrium of the autonomous linear system
is
- Lyapunov stable iff its spectral radius is non-positive:
\rho(A)\in { s \in \mathbb{C}\mid\mathrm{Re}(s)\leq 0 }
\rho(A)\in { s \in \mathbb{C}\mid\mathrm{Re}(s)< 0 }
Lyapunov’s indirect method
Theorem:
Let
for a continuously differentiable , be its equilibrium, and be the corresponding Jacobian matrix.
- If
(all eigenvalues of are in the the open left half-plane - OLHP), then is asymptotically stable. - If
has at least one eigenvalue in , then is unstable. If the rightmost eigenvalue of the Jacobian matrix is on the imaginary axis, then the stability conclusion is ambiguous.
Modal decomposition
A common way to analyze initial conditions for a given linear autonomous system is modal decomposition.
Consider the autonomous state equation
and assume that
Denoting the eigenvectors
we can write:
Defining
where the initial condition only affect the constant scalar coefficients
The form
means that solutions to autonomous systems are a superposition of elementary exponential signals
The signal
Exercises
Question 1
Consider the following state space equation:
Part a
Is the system Lyapunov stable?
Solution:
First, we’ll find the eigenvalues:
Therefore,
Part b
Find a transformation diagonalizing the matrix
Solution:
The eigenvectors:
- for
: we get - for
: we get
Therefore:
Part c
Carry out the modal decomposition of the system with respect to any initial condition
Solution:
The Modal decomposition is given by:
where
Part d
Find the response for the following two initial conditions. Draw the responses in a phase portrait.
Solution:
The inverse of
- for
, we get: Therefore, the response is: - for
, we get: Therefore, the response is:
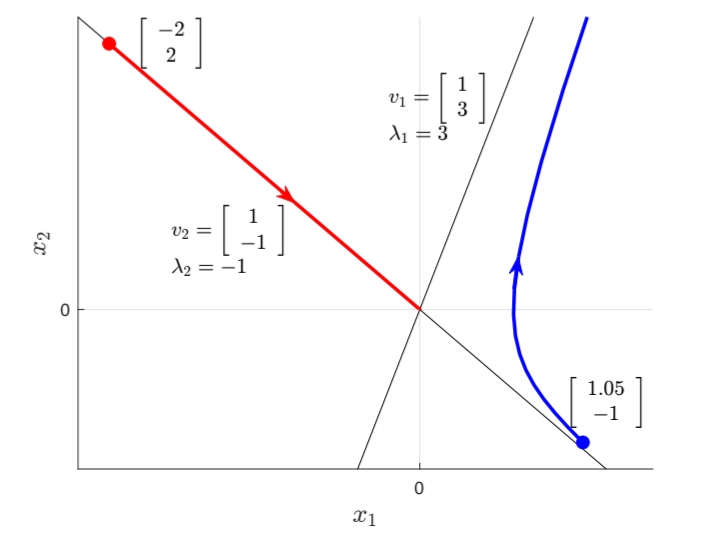
Phase portrait for both initial conditions
Question 2
Given the autonomous dynamics
Is their equilibria Lyapunov stable? Carry out the modal decompositions of the responses.
Solution:
Because the matrix
Both the eigenvalues are on the open left half plane, therefore every equilibrium of this unforced dynamics is asymptotically stable.
For the modal decomposition, we need to find the corresponding eigenvectors.
- for
: we get . - for
: we get .
The similarity transform is then:
its inverse:
Hence, the the degrees of excitations are given by:
And the modal decomposition:
In conclusion:
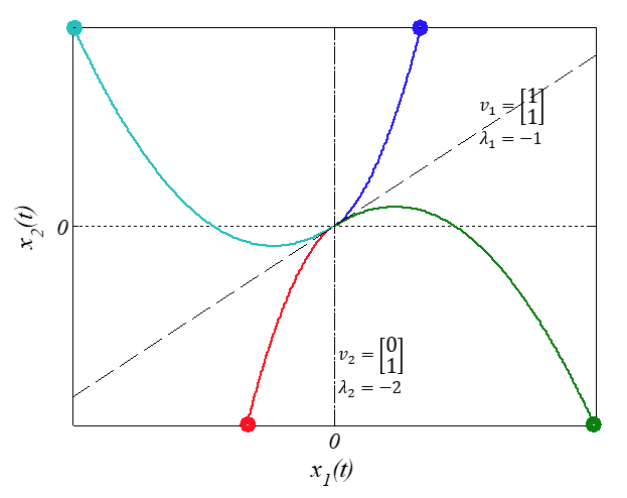
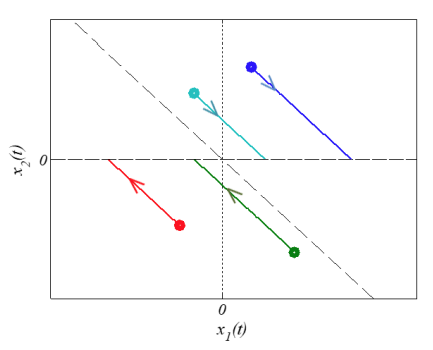
Phase portrait for initial conditions
There are 2 modes in this system,
Question 3
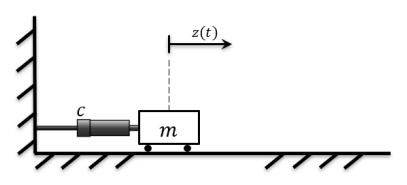
Mass damper system
The system is a mass damper system without a spring. The parameter values are
Is the system stable? Find the response of the system to the initial conditions
Solution:
It can be seen that the equation of motion of the system is
normalized:
Its physical realization is given by:
since
The eigenvalues of
We have a linear system, which is why we can deduce that it is Lyapunov stable, but not asymptotically stable.
The eigenvectors are:
- for
: we get . - for
: we get .
The similarity transform is then:
Its inverse:
Hence, the the degrees of excitations are given by (given
and the modal decomposition:
In conclusion:
It can be seen that the stable mode,
In general, when the system has modes with a real part 0, whose algebraic multiplicity is equal to the multiplicity geometrically, we will get a stable (non-asymptotic) system, i.e. a system that does not diverge from some initial condition but also does not converge.
It is important to understand that a system of this type is “stable” only for the reaction of initial conditions, and when the system will receive any input (even if it is bounded), it can diverge.
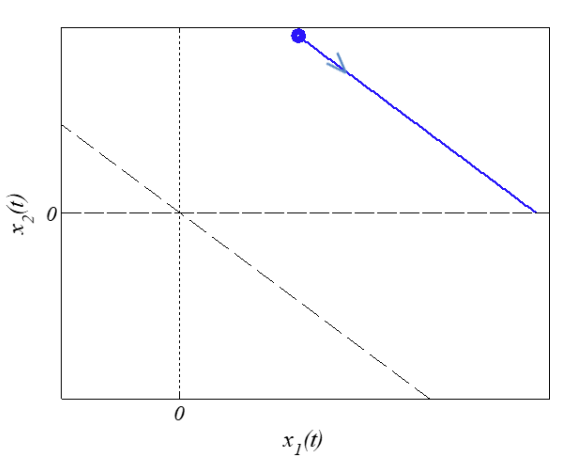
Phase portrait for a single initial condition
Phase portrait for both many initial conditions