טנזור האינרציה
כבר ראינו ש:
כמו במאזן תנע זוויתי מישורי, נרצה למצוא ביטוי יותר נוח לתנע זוויתי, הפעם במקרה המרחבי.
מהגדרה, התנע הזוויתי ביחס לנקודה נעה
מאחר ו-
נציב:
נשתמש ב-bac to cab:
נעבור לסימון וקטורי-מטריצי. כלומר, נרשום את
נוציא את
כדאי לנסות לעבור מכתיב מטריצי זה לכתיב הקודם כדי לראות מה באמת קרה כאן.
קיבלנו מטריצה
הגדרה:
טנזור האינרציה מוגדר כהאינטרל הבא:
כאשר
הוא מטרציה היחידה.
בכתיב אינדקסי:
אז למשל:
הערות:
- נשים לב שכעת, לעומת המקרה המישורי, יש חשיבות לאוריינטציה של מערכת הצירים שלנו. כלומר, אם נסובב את מערכת הצירים שלנו, נקבל טנזור אינרציה שונה.
- עבור מערכת צירים צמודת גוף
, המטריצה תהיה קבועה. לכן, אפשר לומר כי טנזור האינרציה הוא תכונה של הגוף. - עבור גוף עם צפיפות אחידה, האינטגרל בטנזור האינרציה הופך להיות פשוט אינטגרל על הנפח, כך שטנזור האינרציה הופך להיות תכונה גאומטרית.
- הצבה זריזה מראה שטנזור האינרציה סימטרי.
מה הבדל בין טנזור האינרציה הזה ל טנזור האינרציה ממוצקים?
ישנם שני הבדלים עיקריים - מבחינת יחידות, ומבחינת הממדים.
- במוצקים, רכיבי טנזור האינרציה מחושבים כאינטגרל על גאומטריית החתך:
לכן, שם יותר מדויק לטנזור זה הוא מומנט משטחי מסדר שני - הרי אין לו שום קשר לאינרציה.
בדינמיקה, האינטגרציה היא על מסה. מאחר והצפיפות עשויה להשתנות לאורך הגוף, אופן האינטגרציה עשוי להשתנות. רק במקרה של צפיפות אחידה, ניתן אולי להקביל בין שני הטנזורים השונים, כי אז נקבל אינטגרציה על גאומטריית הגוף. נשים לב שלעומת מוצקים, המידות של טנזור האינרציה הם:
- במקרה המישורי, קיבלנו שמומנט האינרציה שלנו הוא פשוט סקלר. אבל, גם במוצקים עסקנו בחתכים מישוריים, וקיבלנו טנזור אינרציה - מטריצה
.
הסיבה להבדל זה הוא לא איזה שוני עצום בין שתי ההגדרות לטנזורים. ההבדל נובע מכך שעסקנו ברכיבים שונים של טנזור האינרציה.
בדינמיקה, כאשר עסקנו במקרה המישורי, אנחנו מקבלים סקלר שמתאר לנו כמה קשה לסובב את החתך המישורי הזה - לפתל את הקורה, שזה עשינו במוצקים 1. במוצקים 2, אנחנו עסקנו ברכיבים אחרים של טנזור האינרציה - רכיבים. רכיבים אלו בכלל מתארים לנו כמה קשה לסובב (לכופף) את הקורה סביב - כיוונים אחרים, שלא אכפת לנו מהם במקרה המישורי של דינמיקה.

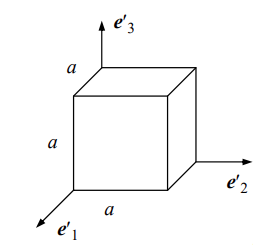
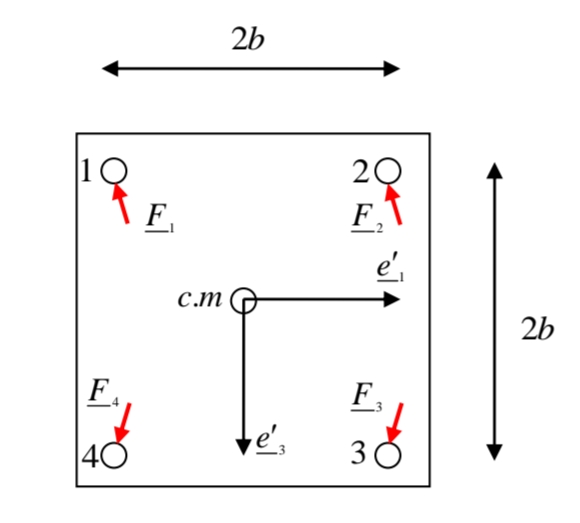
דוגמה: תיבה מלבנית
בהינתן תיבה מלבנית אחידה, נחשב את טנזור האינרציה ביחס למרכז המסה, במערכת צירים המקבילים לצלעות התיבה. נקבל (ביחס למרכז המסה):
בנוסף, כיוון שהגוף סימטרי:
דוגמה: גליל מלא
ביחס למרכז המסה:כיוון שהגוף סימטרי:

דוגמה: כדור מלא
הגוף סימטרי סביב כל ציר שעובר במרכז המסה, כך שנקבל טנזור הידרוסטטי/איזוטרופי/איך שתרצו להקביל למקרים דומים:

דוגמה: כדור חלול עבה דופן
באותו אופן כמו בכדור מלא, נקבל גם כן טנזור אלכסוני:

דוגמה: כדור חלול דק דופן
נוכל פשוט להשאיף את הביטוי שקיבלנו בכדור חלול עבה דופן, למקרה בו. לאחר קצת לופיטל, נקבל:

תנע זוויתי יחסי של גק”ש במרחב
לכן, התנ”ז היחסי לנקודה
בכתיב אינדקסי:
משפט ההזזה המקבילה
נוכל להכליל את משפט שטיינר למקרה המרחבי - הזזה של נקודת הייחוס לחישוב טנזור אינרציה.
משפט:
בהינתן טנזור ביחס למרכז המסה
, טנזור האינרציה ביחס לנקודה הוא:
בכתיב אינדקסי, למשל:
או אם
פיתוח:
נתון
מהגדרה:
נציב
דוגמה: כדור מלא
אנו יודעים שביחס למרכז המסה:נרצה להזיז את נקודת הייחס של טנזור האינרציה לנקודת שפה
, שנמצאת ביחס למרכז המסה ב: לפי משפט ההזזה המקבילה:
נציב במשפט את
: נקבל:

טרנספורמציית סיבוב
- טנזור הטרנספורמציה במוצקים
אנו יודעים שהקשר
כלומר, שני הביטויים הבאים נכונים:
בהינתן
נסמן מטריצת סיבוב
הערה:
שימו לב ש-
הם וקטורים, בעוד הם מטריצות!
אבל, כיוון ש-
עבור טנזור אינרציה לא אלכסוני, הוקטורים
האם תמיד קיימת טרנספורמציה שהופכת את טנזור האינרציה לאלכסונית? כלומר, האם
כן! לא נוכיח, אבל זה זהה לגמרי למציאת מאמצים ראשיים בבמוצקים 2.
הע”ע
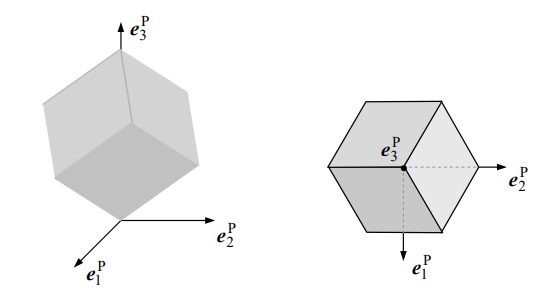
דוגמה: קוביה מלאה
לקוח מתוך (Elata, 2002).
חשבו את טנזור האינרציה של הקובייה המסתובבת סביב נקודת הראשית, ומצא את הערכים והכיוונים הראשיים.פתרון:
במערכת הראשית העוברת במרכז המסה, אנו יודעים ש:היות ושלושת הערכים העצמיים זהים, הטנזור הוא טנזור איזוטרופי (כל מערכת העוברת במרכז המסה היא מערכת ראשית). במערכת המקבילה, יחסית לראשית נקבל:
הערכים העצמיים של הטנזור הם:
והוקטורים העצמיים המתאימים הם:
הערך העצמי
שווה לערך העצמי סביב מרכז המסה מכיוון שהוקטור הראשי התואם עובר דרך מרכז המסה. רכיבי טנזור הטרנספורמציה מהמערכת המתוארת למערכת הראשית היא:
מאזן תנע זוויתי יחסי במערכת צירים צמודת גוף
ביחס לנקודה נעה
עבור נקודת צמודת גוף
נוכל לבטא זאת במערכת צירים צמודת גוף
נשווה בינהם ונקבל:
מקרים פרטיים:
-
עבור נקודת ייחוס במרכז המסה:
-
אם לגוף יש נקודת ייחוס נייחת:
-
אם
מכוון בכיוון ציר אינרציה ראשי וגם המומנט בכיוון זה , נקבל:
דוגמה: כדור על דסקה סובבת
כדור במסהורדיוס מתגלגל ללא החלקה על דסקה המסתובבת במהירות זוויתית קבועה .
מיקום מרכז המסה על הכדור נתון ע”י:מקנים לכדור תנאי התחלה
. דרוש למצוא את מסלול התנועה ואת , שהיא המהירות הזוויתית של הכדור.
לפי מאזן תנע קווי:לפי מאזן תנע זוויתי ביחס למרכז המסה:
מהדג”ח, אנו יודעים ש:
אנו גם יודעים שבמקרה של כדור:
נציב במאזן התנע הזוויתי:
נבודד את
ב- , ונציב לתוך ונקבל: ברכיבים:
קיבלנו כי בכיוון
, . כלומר, הסיבוב ההתחלתי של הכדור סביב לא משתנה. עבור שאר הכיוונים, ניעזר כבר בתנאי אי-החלקה (גלגול טהור) -
. עבור הנקודה על הכדור: נקודה
על הדסקה: נשווה בין
ו- ונפרק לכיוונים: נרצה לשלב את משוואות אלו עם משוואות
. כדי לעשות זאת, נגזור קודם את משוואות אלו, כאשר נשים לב ש- : נציב את
לתוך (נבטל את ): נזהה שזוג משוואות אלו הן למעשה נגזרות של משוואות יותר פשוטות:
לכן, נוכל לומר כי:
נציב את
מ- לתוך : כאשר
. נגדיר משתנה . לכן: הפתרון של משוואה דיפרנציאלית זו היא:
נוכל לחזור למשתנה
: כאשר
נקבעים ע”י תנאי ההתחלה.
באותו אופן נבצע עבור, ונקבל: כאשר
, ו- נקבעים ע”י תנאי התחלה.


משוואות אויילר
ראינו במאזן תנע זוויתי ש:
נוכל לבחור מערכת צירים צמודת גוף
לכן:
כאשר
משוואות אלו נקראות משוואות אויילר לגוף קשיח.
-
אם
ו- , אז: ואז נוכל להסתפק במשוואה אחת כדי לתאר את סיבוב הגוף:
-
עבור תנאי התחלה שאינו חד-צירי במדויק:
כאשר
.
נציב במשוואות אויילר ונקבל ש-, אבל גם . כלומר, העובדה שיש סיבוב קטן ב- , גורם לכך שרגע אחרי יהיה סיבוב גם ב- - יש צימוד בין הצירים הצמודי גוף. -
מקרה נוסף מעניין הוא גוף עם סימטריה סיבובית (אקסיסימטרי). למשל, עבור גליל,
. ממשוואת אויילר בכיוון , נקבל: מה שמבטל את הצימוד בין הצירים
ו- , וגם את הצימוד בין הצירים ו- .
מתקף והתנגשות בגק”ש

התנגשות של גוף קשיח כללי בקיר. כוח ההתנגשות לא חייב להיות נורמלי לקיר.
במקרה של התנגשות בנקודה
כאשר
כמו במערכת חלקיקים, נוכל לפתח מאזן מתקף קווי:
כאשר
את השינוי בתנע הזוויתי
ואז:
המתקף
לכן, מהגדרת המומנט, נוכל לרשום את המתקף הזוויתי באופן הבא:
נדרש להניח הנחה נוספת בכיוון המשיקי למגע,
- אפשרות א’ - מגע חסר חיכוך, ואז המתקף הוא רק בכיוון הנורמלי -
. - אפשרות ב’ - אי-החלקה לאחר ההתנגשות -
.
עבודה ואנרגיה בגק”ש
הספק מכני
במערכת חלקיקים ראינו כי אם הגוף קשיח, ההספק יהיה תלוי אך ורק בכוחות החיצוניים:
נשים לב שעל גוף קשיח יכל לפעול גם מומנט טהור
כך ש-
אם
לכן, נסיק כי במקרה של גוף קשיח:
כאשר
נרשום מחדש את משוואה זו, הפעם ביחס לנקודת מרכז המסה
נרצה להוציא את
נוציא את
הביטויים בתוך הסוגריים הם פשוט הביטויים לסך הכוחות והמומנטים הפועלים על גק”ש ביחס למרכז המסה שלהם:
אנרגיה קינטית בגק”ש מרחבי
בפרק קודם עסקנו באנרגיה קינטית במקרה המישורי. כעת בעזרת הגדרת טנזור האינרציה נוכל להרחיב למקרה המרחבי. ראינו כי ביחס לנקודה צמודת גוף
מהגדרת טנזור האינרציה אנו יכולים לרשום
את המכפלה הסקלרית
זוהי מכפלה של שורה, במטריצה, בעמודה, מה שמניב סקלר. נקבל:
אם
ואז מתקיים:
ואז:
אם נבחר נקודת ייחוס במרכז המסה, במערכת צירים ראשית:
אם לגוף הקשיח יש נקודה עומדת
אם נרצה לגזור את
נשים לב שלפי מאזן תנע קווי מתקיים
נציב בנגזרת של
קיבלנו את הביטוי להספק מכני:
כעת, כמו בחלקיק, נוכל לקבוע כי עבור גוף קשיח ישנו מאזן אנרגיה כללי ומאזן הספקים כללי:
דוגמה: מטוטלת על בסיס נע
נתונה מטוטלת הנעה על בסיס חסר מסה, שנע ללא חיכוך על מסילה. למפרק מחובר מוט אחיד ודק בעל מסה
ואורך .
משחררים את המטוטלת ממנוחה במצב:נדרש למצוא את תנועת המטוטלת.
נוכל לומר כי יש שימור אנרגיה מכנית כוללת, כי כל הכוחות במערכת שמבצעים עבודה הם כוחות משמרים.
מהדג”ח ניתן לראות שיש שימור תנע קווי בכיוון(אין כוחות הפועלים בכיוון זה). אנחנו גם יודעים שבהתחלה
(המטוטלת שוחררה ממנוחה). לכן, מהשימור: לכן, נוכל לומר ש:
ולכן בכל רגע מיקום מרכז המסה בכיוון
נשאר במיקומו ההתחלתי: בהמשך נראה כי
הוא פשוט: מיקום מרכז המסה הוא:
נגזור:
מצאנו ש-
, ולכן: נרצה להשתמש בשימור אנרגיה, אז נחשב את האנרגיה הקינטית:
במקרה של מוט דק באורך
, מומנט האינרציה שלו ביחס למרכז המסה הוא . נציב: הראנו ש-
, ולכן: נחשב את האנרגיה הפוטנציאלית:
נציב כעת בשימור אנרגיה, כאשר נשווה למצב ההתחלתי:
זוהי משוואה פרידה שניתן ממנה לחלץ ביטוי מפורש ל-
.


תרגילים
שאלה 1
מכונית צעצוע בנויה מעגלה בעלת ארבעה גלגלים שעליה מורכב גלגל תנופה הסובב סביב ציר אופקי כמתואר. רדיוס גלגל התנופה הוא
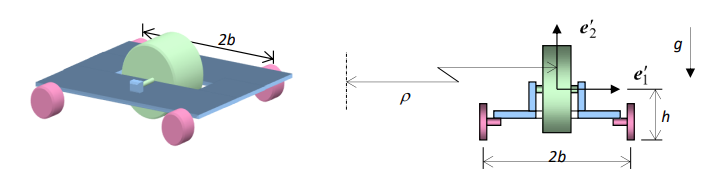
סכימת המכונית צעצוע
היות ומרכז המסה של המכונית נמצא בגובה
פתרון:
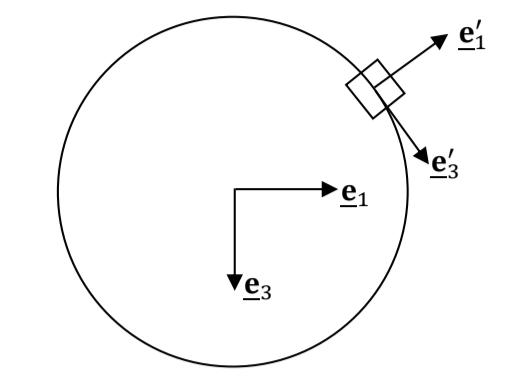
מבט צד על מסלול המכונית
דרוש:
סעיף א’
כאשר
פתרון:
לפי הגדרת מערכת הצירים
מאזן תנע קווי על הגק”ש:
נבצע מאזן תנע קווי:
דג”ח ממבט על
סכום הכוחות עבור כל אחד מהגלגלים
כאשר
מסימטריה, הכוחות על הגלגלים הפנימיים זהים, והכוחות על הגלגלים החיצוניים זהים, ונסמנם:
מאחר והמכונית בתנועה מעגלית קצובה (מהירות משיקית קבועה), תאוצת מרכז המסה שלה היא פשוט:
נציב הכל במאזן תנע קווי:
קיבלנו שלושה משוואות:
מאזן תנע זוויתי על הגק”ש:
מתנע זוויתי יחסית למרכז המסה:
הסיבוב של הגק”ש נתון כ:
טנזור האינרציה של גלגל:
ולכן התנע הזוויתי:
נגזור לפי כלל האופרטור (כאשר נניח כי
ולכן:
נחשב את המומנטים סביב מרכז המסה:
נשווה לפי מאזן תנע זוויתי ונקבל שלושה משוואות:
ממשוואות
כעת עבור כל אחד מהסעיפים, נציב את הנתונים הרלוונטיים.
בסעיף הנוכחי, מתקיים
סעיף ב’
כאשר
פתרון:
נציב פשוט
סעיף ג’
כאשר
פתרון:
נציב את הנתונים ונקבל:
סעיף ד’
כאשר
פתרון:
נדרוש ש-