מערכת קואורדינטות נעה, ומערכת וקטורי בסיס סובבת
סיבוב סופי
סיבוב סופי אינו קומוטטיבי.
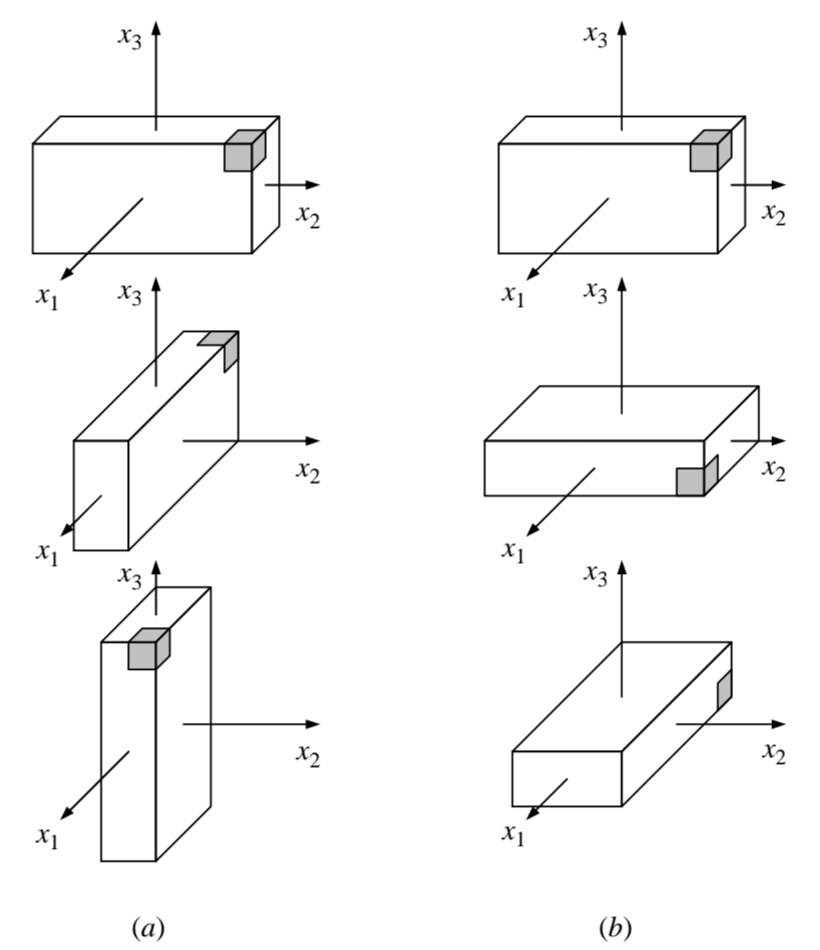
המחשת האי-קומוטטיביות של סיבוב סופי.
סיבוב סופי סביב ציר ולאחריו סיבוב סופי סביב , סיבוב סופי סביב ציר ולאחריו סיבוב סופי סביב (Elata, 2002).
כאשר מבצעים שני סיבובים סופיים עוקבים התוצאה הסופית תלויה בסדר בו מבצעים את שתי פעולות הסיבוב.
סיבוב אינפיניטסימלי
סיבוב אינפיניטסימלי הוא פעולה קומוטטיבית - סדר הפעולות לא משנה. האיור הבא מסביר זאת:
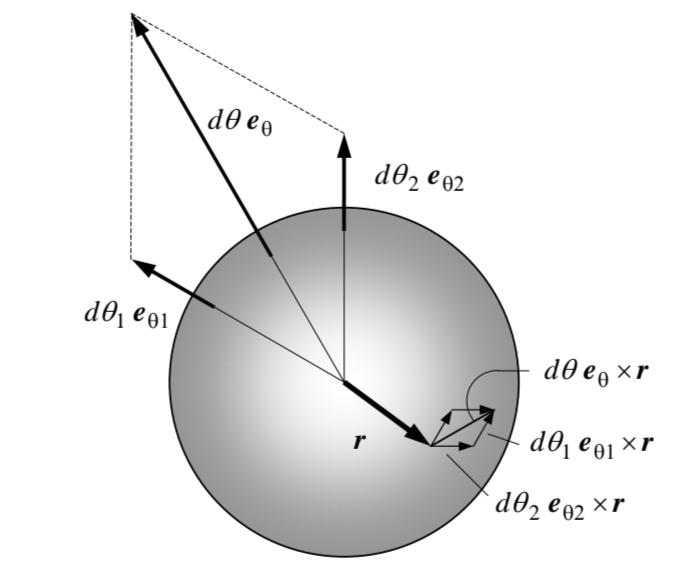
שינוי זווית אינפיניטסימלי (Elata, 2002).
עבור זוויות
טנזורי הסיבוב עבור כל זווית יהיו מהצורה:
נקבל כי אין חשיבות לסדר ההכפלות:
מערכת וקטורי בסיס סובבת
נסתכל על וקטור בסיס במערכת סובבת (או מסתובבת)
כאשר
נחזור לחדו”א 1, לפיו הגדרת הנגזרת:
נסמן
נסמן את וקטור המהירות הזווית
הוקטור
הערה:
בספרויות שונות כאשר משתמשים בנגזרת זו, במקום
, מורידים את הסימון , ומשתמשים באות הקטנה . אנו מסמנים כך כדי להדגיש את העובדה שאנו במערכת , וכדי להבדיל מסיבוב של גוף קשיח שמסומן ב- , שנלמד בהמשך.
כלל האופרטור
בהינתן וקטור
כאשר נגזור אותו נקבל:
כאשר
נשים לב כי יש לנו כאן דו משמעות בסימונים שלנו -
משוואה זו נקראת כלל האופרטור (הנגזרת) והיא מתארת את מימוש הנגזרת המוחלטת
דוגמה: קינמטיקה של חלקיק במערכת צירים פולרית (גלילית)
חלקיק נע בתנועה מישורת המתוארת ע”י קואורדינטות פולריות
. דרוש לבטא את וקטורי המיקום, מהירות ותאוצה במערכת הצירים הפולרית .
הבעיה היא מישורית, ולכן וקטור המהירות הזוויתית של מערכת הציריםנתון ע”י .
וקטור המיקום יהיה.
לכן וקטור המהירות ע”פ כלל האופרטור:בזהות מוחלטת למה שקיבלנו בקואורדינטות פולאריות.
עבור התאוצה נפעיל שוב את כלל האופרטור:שגם זה זהה למה שקיבלנו בקואורדינטות פולאריות.
דוגמה: חישוב נגזרת של וקטור המהירות הזוויתית
של מערכת הצירים לפי כלל האופרטור:
דוגמה: וקטור נגזרת שנייה במערכת סובבת
נתון:
דרוש לחשב נגזרת שנייה בזמן
לפי כלל האופרטור. נפעיל שוב את כלל האופרטור:
קיבלנו את נוסחת 4 האיברים לתאוצה במערכת סובבת:
דוגמה: חישוב תאוצה במערכת כדורית עבור מקרה ספציפי
מסלול של חלקיק על מעטפת כדור נתון בקואורדינטות כדוריות ע”י:
כאשר
קבוע ו- קבוע. דרוש לבטא את במערכת צירים כדורית.
וקטור המיקום שלנו יהיה.
לפני שנשתמש בכלל האופרטור, עלינו למצוא את. במקרה שלנו, נוכל לתאר את בקואורדינטות גליליות: נרצה לעבור לקואורדינטות כדוריות. נשים לב ש-
, ולכן: כעת, לפי כלל האופרטור, המהירות תהיה נתונה ע”י:
נפעיל שוב את הכלל בשביל התאוצה:
כאשר
הוא הכיוון הרדיאלי במערכת הגלילית, והוא מקיים:
תרגילים
שאלה 1
גלגל ברדיוס
הזרוע
הזרוע
מערכת הצירים
ברגע
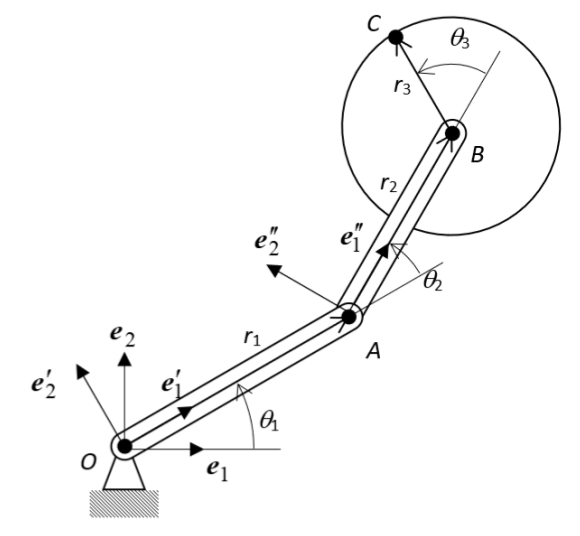
סכמת הבעיה
סעיף א’
חשבו את המהירות המוחלטת והתאוצה המוחלטת של נקודה
פתרון:
נגדיר את וקטורי המהירות הזוויתית של שתי המערכות:
עבור
וקטור המיקום של נקודה
נוכל לבטא את
לכן:
לפי כלל האופרטור:
נשתמש בטבלה:
לכן וקטורי המהירות והתאוצה:
סעיף ב’
חשבו את התאוצה היחסית של נקודה
פתרון:
נביע את המיקום היחסי
כעת כאשר נגזור לפי כלל האופרטור, נצטרך לגזור לפי המהירות הזוויתית של
נבנה טבלה:
לכן:
ביקשו במערכת
סעיף ג’
חשבו את המהירות של נקודה
פתרון:
נבנה מערכת
לכן מיקום
לפי כלל האופרטור:
נקבל כי:
סעיף ד’
חשבו את המהירות המוחלטת של נקודה
פתרון:
בכל מערכת צירים:
הערה:
ביקשו מהירות מוחלטת, ולכן כאשר אנו רושמים למשל
אנו מתכוונים ל- - כלומר למהירות של ביחס לנקודה קבועה.
נמצא את
נציב:
את
ולכן:
נציב
סעיף ה’
חשבו את המהירות של נקודה
פתרון:
מנקודת המבט של המצלמות, המערכת
כלומר, נחשב רק את
נמצא את נגזרת הבסיס:
שאלה 2
אל מוט טלסקופי
- החלק
של המוט מסתובב במהירות זוויתית קבועה סביב ציר אנכי. - הטבעת מסתובבת במהירות זוויתי קבועה
סביב הציר . - מרכז הטבעת
, מתרחק מהנקודה במהירות קבועה .
הנקודה
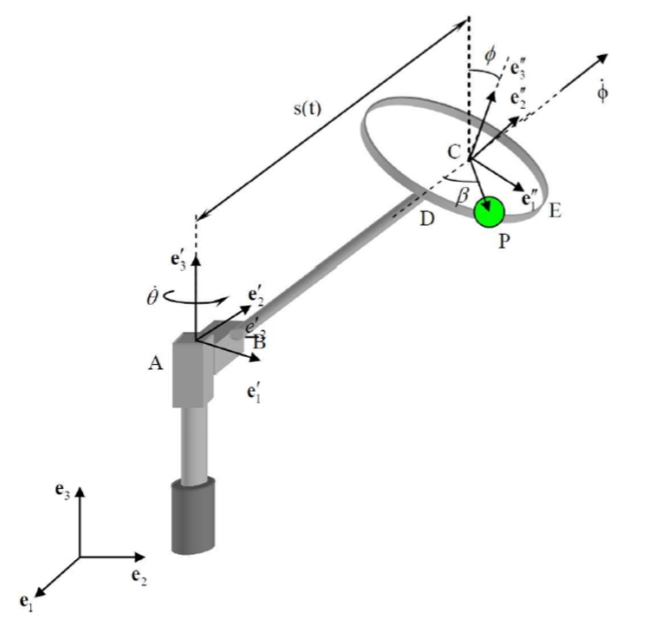
סכמת הבעיה
סעיף א’
מהי המהירות הזוויתית המוחלטת של הטבעת?
פתרון:
אנו יודעים כי
לגבי מערכת הצירים
לכן המהירות הזוויתית של הטבעת:
כאשר נשים לב ש:
סעיף ב’
מהי התאוצה הזוויתית המוחלטת של הטבעת?
פתרון:
מבקשים למצוא את התאוצה של הטבעת. כלומר, עלינו לגזור את
נקבל (לאחר טבלה) כי:
סעיף ג’
מהי המהירות המוחלטת והתאוצה המוחלטת של נקודה
פתרון:
מיקום הנקודה
נבחר לייצג את המהירות המוחלטת במערכת
לכן:
נגזור לפי כלל האופרטור:
נקבל כי:
נציב את תנאי ההתחלה בזמן