שדה המהירות בגוף קשיח
גוף קשיח הוא גוף רציף של חלקיקים בעל גודל סופי השומר על קבועה.
כל שתי נקודות
לכן אם נגזור את המכפלה שלו בעצמו, נקבל אפס:
כלומר המהירות היחסית ניצבת בהכרח למיקום היחסי.
וקטור מהירות זוויתית רגעית של גוף קשיח
במערכת צירים צמודת-גוף
אם נגזור במערכת זו:
ה-
הגדרה:
נגדיר
וקטור מהירות סיבוב רגעית של הגוף הקשיח:
הקשר נכון לכל שתי נקודות גוף
כדי לתאר את המהירות הרגעית של כל נקודת גוף
ביטוי זה נקרא שדה המהירויות של הגוף הקשיח.
אם נרצה למצוא את התאוצה המוחלטת של נקודה
וביטוי זה נקרא שדה התאוצות של הגוף הקשיח.
חישוב קצב סיבוב מקינמטיקה של שלוש נקודות בגוף
אם נתונים מיקומים רגעיים
ניקח את הקשר
נכפול וקטורית משמאל ב-
נפתח את אגף ימין ע”י מכפלה וקטורית משולשת (bac to cab):
אנו יודעים כי
מביטוי זה ניתן לראות שכדי שנוכל למצוא את המהירות הזוויתית באמצעות נוסחה זו צריכים להתקיים שני תנאים:
- הנקודות
לא יכולים להיות על אותו קו, כי אז מתאפס. - המהירות הזוויתית
לא נמצאת על המישור הנפרש ע”י הוקטורים .
מציאת מהירות זוויתית שמקבילה למישור
אם מתקיים התנאי הראשון -
נמצא את המקדמים:
נכפיל סקלרית את השני האגפים ב-
ולכן:
מכאן נציב ונקבל נוסחה עבור המקרה בו
מציאת רכיב נורמלי של המהירות הזוויתית
בהינתן מיקומים
אנו יודעים כי מתקיים
כאשר:
נציב במכפלה הוקטורית:
נכפול וקטורית את שני האגפים ב-
לפי הזהות bac to cab:
נחלק ב-
נשים לב ש-
לכן, מתוך
תנועת גוף קשיח במישור
טענה:
עבור גוף קשיח מישורי במצב מהירויות רגעי, קיימת נקודת צמודת גוף שמהירותה הרגעית אפס, והיא נקראת מרכז סיבוב רגעי.
כדי למצוא את הנקודה הזאת, נוכל להיעזר בשדה מהירות של הגוף הקשיח:
מחפשים

גוף מישורי כללי עם שתי נקודות והמהירויות הרגעיות שלהן. הנקודה
נמצאת על חיתוך הניצבים למהירויות, והיא המרכז הסיבוב הרגעי.
מקרה מיוחד של
תנועה בורגית רגעית וציר סיבוב רגעי
ציר סיבוב רגעי
טענה:
יהי גוף קשיח בתנועה מרחבית עם נקודת גוף עומדת
( ). יהי וקטור מהירות זוויתית רגעית , שניתן לרשום כ- .
נקודות גוף הנמצאות על קושעובר דרך וכיוונו כולן בעלות מהירות רגעית אפס. הקו נקרא ציר סיבוב רגעי.
הוכחה:
נסמן נקודה כללית
לפי שדה המהירויות:
כלומר, קיבלנו שלנקודה
דוגמה: נקיפה של סביבון (precession)
סביבון המסתובב סביב
וסביב עצמו במהירות זוויתית קבועים. נתונים:
לכן וקטור הסיבוב הרגעי שלו נתון ע”י:

ציר בורגי רגעי
טענה:
נתון גוף קשיח הנע בתנועה כללית, עם מהירות זוויתית רגעית
.
קיים קו של נקודות (צמודות גוף) שכל נקודותיו נעות במהירות שווה המקבילה ל-. קו זה נקרא ציר הבורג הרגעי.
הוכחה:
ראשית, נראה כי לכל נקודות הגוף אותו רכיב מהירות בכיוון
ניקח שתי נקודות גוף כלליות
ואכן קיבלנו כי:
כעת נרצה למצוא את המקום הגיאומטרי של נקודות גוף אשר נעות בכיוון
מחפשים נקודת גוף
נכפול וקטורית ב-
נחלק ב-
נפרק את
נשים לב כי
כלומר קיבלנו ביטוי לחלק הניצב ל-

מערכת הצירים המוגדרת ע”י
ו- .
נשים לב כי
במקרה המישורי, בו גוף מסתובב סביב
(כי אנחנו במקרה מישורי, אנחנו לא יכולים לזוז בניצב למישור). לכן, ציר הבורג הרגעי הוא ציר הסיבוב הרגעי. הנקודה במישור הלוח
וזוהי למעשה הנוסחה למציאת מיקום מרכז הסיבוב הרגעי, בהינתן
דוגמה:
נתון כי:מצאו את מרכז הסיבוב הרגעי
כתלות ב- .
פתרון:מקרים פרטיים:
- אם
מרכז הסיבוב הרגעי ב- . - אם
, מרכז הסיבוב הרגעי בפינה העליונה של הגוף. - אם
, מרכז הסיבוב הרגעי נמצא באינסוף, שזה שקול פשוט למקרה של תנועה קווית טהורה במהירות .

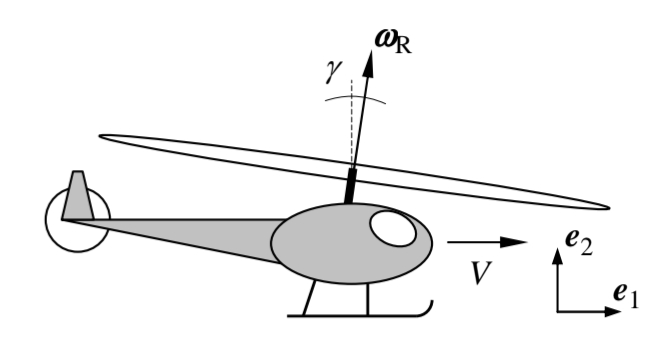
דוגמה: מסוק טס אופקית
דוגמה מ(Elata, 2002).
מסוק טס אופקית במהירותוהרוטור שלו שרדיוסו מסתובב בקצב יחסית למסוק. חשב את מיקום וכיוון הציר הרגעי של הרוטור ואת מהירות הציר.
פתרון:
קצב סיבוב הרוטור הוא:מהירות מרכז הרוטור היא
. לכן, מיקום ציר הסיבוב הרגעי: מהירות ציר הסיבוב:
תרגילים
שאלה 1
נתונות 3 נקודות על גוף קשיח:
ומהירויותיהן:
סעיף א’
האם שדה המהירויות הנתון יתכן בגוף קשיח?
פתרון:
אנו יודעים שבגוף קשיח המהירות היחסית בין כל 2 נקודות ניצב למיקום היחסי. כלומר, נבדוק שלכל זוג
סעיף ב’
מהו וקטור המהירות הזוויתית של הגוף?
פתרון:
עבור 3 נקודות ניתן להשתמש בנוסחה עבור מהירות זוויתית:
נחשב את המכנה בנפרד:
לכן נוכל להמשיך להשתמש בנוסחה כדי לקבל:
סעיף ג’
מהי משוואת ציר הבורג במרחב?
פתרון:
תהי נקודה
נמצא את
נמצא את
נציב ונקבל את
ולכן משוואת ציר הבורג:
סעיף ד’
באיזו נקודה חותך ציר הבורג את המישור
פתרון:
נרצה למצוא עבור איזה ערך של
נציב חזרה ל-
סעיף ה’
מהי מהירות הגוף הקשיח במקביל לציר הבורג ?
פתרון:
כיוון ציר הבורג הינו
כלומר הגוף הקשיח אינו מתקדם בכיוון ציר הבורג אלא רק מסתובב סביבו ברגע הנתון.
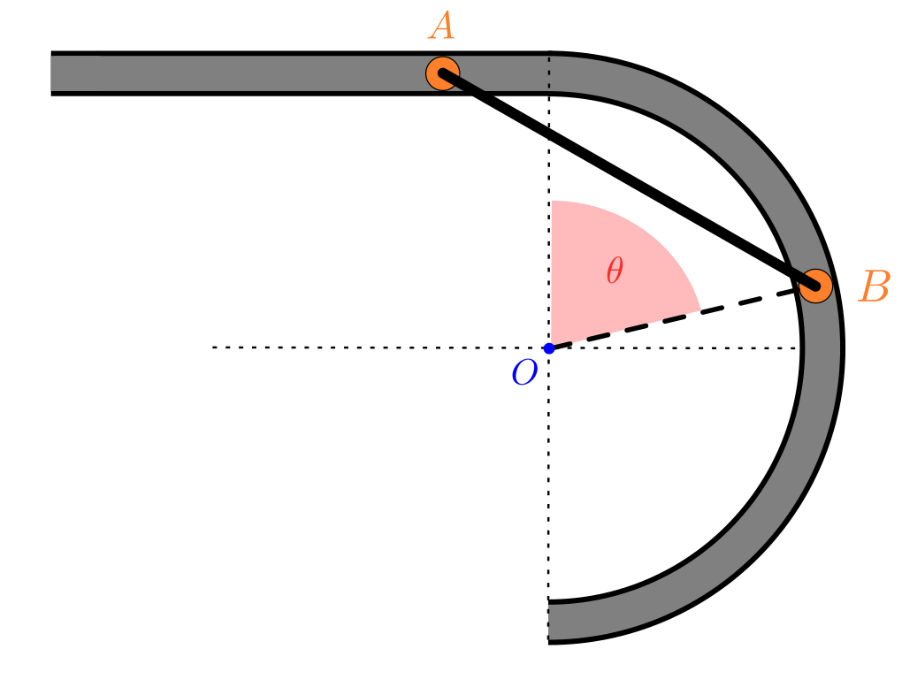
שאלה 2
אל מוט
נתונים
סכמת הבעיה
סעיף א’
מצא את המהירות הזוויתית
פתרון:
לשם נוחות נצמיד מערכת צירים
מתקיים ש-
עלינו למצוא את
- מציאת
מנקודת המבט של הגוף הקשיח:
נמצא את מהירותביחס לנקודה : לפי גוף קשיח: קיבלנו: - מציאת
מנקודת המבט הגיאומטרית של הנקודה:
מיקום הנקודההוא: נמצא את בעזרת כלל האופרטור - כאשר נשתמש ב- . נבנה טבלה:
| קיבלנו: |
נשווה בין שתי הערכים ל-
סעיף ב’
מהי המהירות הזוויתית המוחלטת של הגלגל?
פתרון:
המהירות הזוויתית המוחלטת של הגלגל הינה
סעיף ג’
מהי התאוצה הזוויתית של הגלגל?
פתרון:
נשתמש בכלל האופרטור על מנת למצוא את התאוצה הזוויתית,
נשתמש בטבלה, כאשר נשים לב כי
| לכן התאוצה הזוויתית היא: |
סעיף ד’
מהו ציר הסיבוב הרגעי של הגלגל?
פתרון:
תהי
נשים לב כי ציר הסיבוב נמצא על מישור
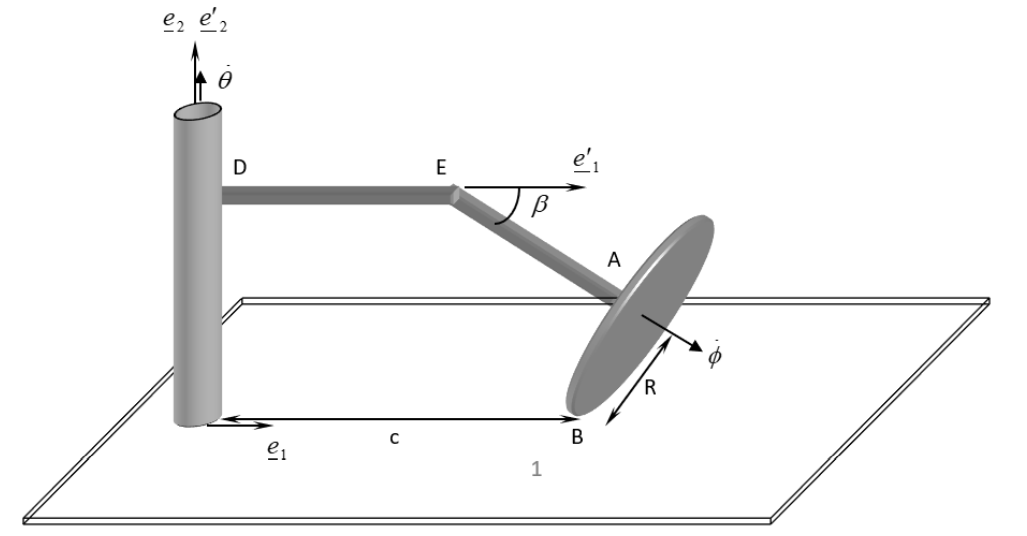
שאלה 3
מוט
סכמת הבעיה
נתונים
סעיף א’
מהי המהירות הזוויתית של המוט
פתרון:

הגדרת מערכות הצירים
נגדיר מערכת צירים
נגדיר גם מערכת צירים
כאשר
נשים לב כי תחת אילוצי הגאומטריה:
לפי סיבוב רגעי:
ולכן:
אנו יודעים שהנקודה
עם שלושה נעלמים
נוכל למצוא עוד משוואה באמצעות אילוץ גיאומטרי. נבנה את משולש

משולש
מטריגונומטריה מתקיים:
בנוסף:
נציב את
עבור הנעלמים
מכאן:
סעיף ב’
מהי התאוצה הזוויתית של המוט
פתרון:
נשתמש במשוואת גוף קשיח לתאוצה:
כאשר התאוצה של גלגלת
- נתחיל מלמצוא את
.
לפי כלל האופרטור, כאשר: נגזור שוב: נוכל גם למצוא את מהנתון שגודל מהירות הגלגלת קבועה ושווה : ולכן: - נמצא את
: - נמצא את
:
נציב ונקבל:
מכאן נקבל שתי משוואות בשני נעלמים
לאחר הצבות והרבה אלגברה מגעילה, נקבל אלגברה מגעילה עוד יותר:
לגבי