מבוא
המערכת המכנית הכי בסיסית היא מערכת עם דרגת חופש אחת, שמאופיינת ע”י העבודה שתנועתה מתוארת ע”י קואורדינטה אחת. תנועה זו מתוארת ע”י מד”ר מסדר ראשון - למשל בעזרת חוק שני של ניוטון, נמצא קשר בין הכוח
הרטט של מערכת כתגובה לתנאי התחלה כלשהם -עירור, נקרא רטט חופשי. כדי למצוא את התגובה לעירורים התחלתיים, אנו צריכים לפתור מד”ר הומוגנית, כלומר אחת עם אפס כוחות מופעלים עליו.
לעומת זאת, הרטט של מערכת כתוצאה מכוחות המופעלים עליו נקרא רטט מאולץ, והוא מייצג בעיה הרבה יותר כללית מהבעיית רטט חופשי, וזאת מכיוון שיש מגוון סוגים שונים של כוחות שיכולים לפעול על המערכת.
- כדאי להסתכל שוב על פונקציות תמסורת ממעלה ראשונה ושנייה.
רטט סביב נקודות שיווי משקל
אנו מכירים מדינמיקה, פיזיקה וכמובן גם ממערכות לינאריות שסביב נקודות שיווי משקל אנו יכולים לפשט משמעותית את משוואות התנועה של מערכת מסוימת.
נביט במערכת הבאה עם דרגת חופש אחת:
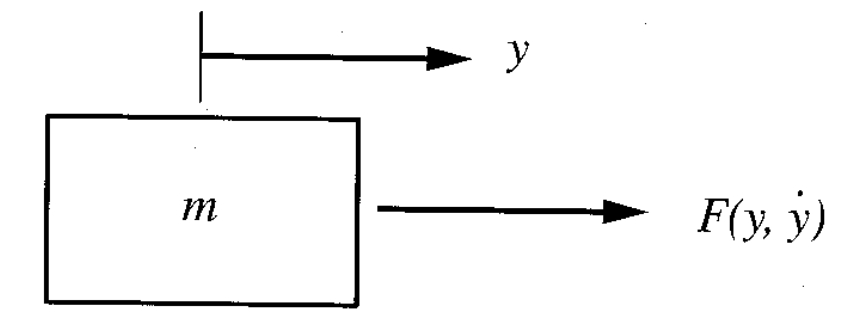
מסה תחת כוח לא-לינארי. (Meirovitch, 2001).
משוואת התנועה של מערכת זו היא מהצורה:
כאשר
אנו מניחים שאין פתרון כללי למשוואה זו, ואנו מעוניינים רק בפתרונות המיוחדים שעשויים לתת תנו תמונה בהירה יותר על התנהגות המערכת. לכן, אנו מחפשים פתרונות למערכת בהם
כיוון שהמהירות והתאוצה הם אפסיים, הפתרונות הקבועים המקיימים את התנאים לעיל מתארים נקודות שיווי משקל. ניתן לקבל אותם ע”י המשוואה:
כאשר מערכת מופרעת מהנקודות שיווי משקל, אנו מסווגים את התנהגותה ליד נקודת שיווי המשקל כיציבה אסימפטוטית, יציבה, או לא-יציבה.
כדי למצוא את סוג היציבות של הנקודת שיווי משקל, נבצע לינאריזציה למערכת - נבחר לרשום את הפתרון של משוואת התנועה באופן הבא:
כאשר
נפתח טור טיילור ל-
את כל הביטויים ממעלה שנייה -
אנו נקבל משוואה מהצורה הבאה:
זוהי משוואת התנועה החדשה של המערכת תחת הנחות הזזות קטנות. נוכל לסווג את יציבות הנקודות שיווי משקל של מערכת זו ע”י הפרמטרים
נשים לב שמשוואה זו היא מד”ר עם מקדמים קבועים, כך שפתרונה היא מהצורה:
כאשר
מה שנקרא גם המשוואה האופיינית של המד”ר. פתרונה:
כך שפתרון המד”ר הוא:
נשים לב ש-
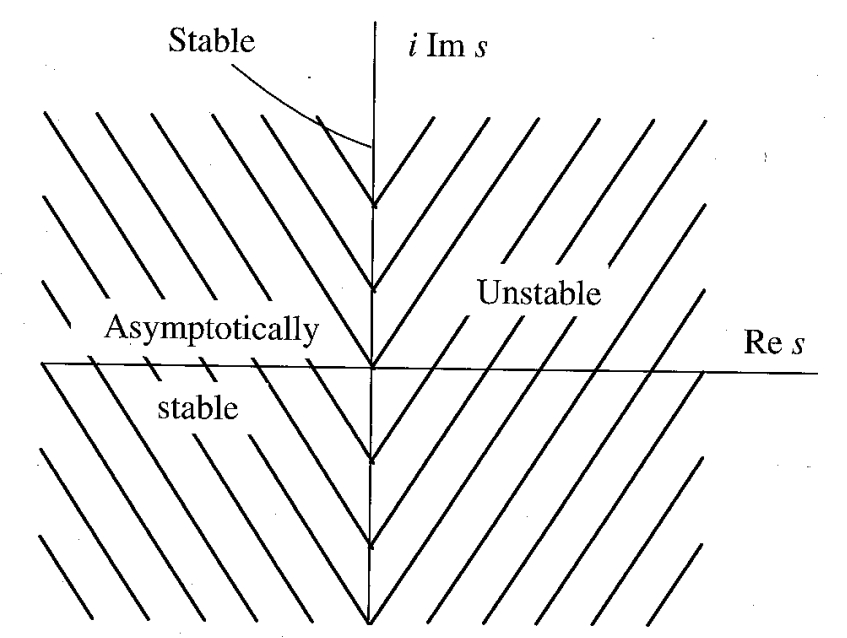
יציבות במישור לפלס. (Meirovitch, 2001).
מפתרון המד”ר אנו יכולים לראות שאם
תנועה לא מחזורית דועכת (aperiodically decaying motion). (Meirovitch, 2001).
אם השורשים
תנועה דועכת באופן מותנד (oscillatory decay motion). (Meirovitch, 2001).
כלומר, נקודת השיווי משקל יציבה אם השורשים נמצאים במישור השמאלי הפתוח של מישור לפלס.
נוכל גם לתאר את יציבות המערכת ישירות ע”י הפרמטרים
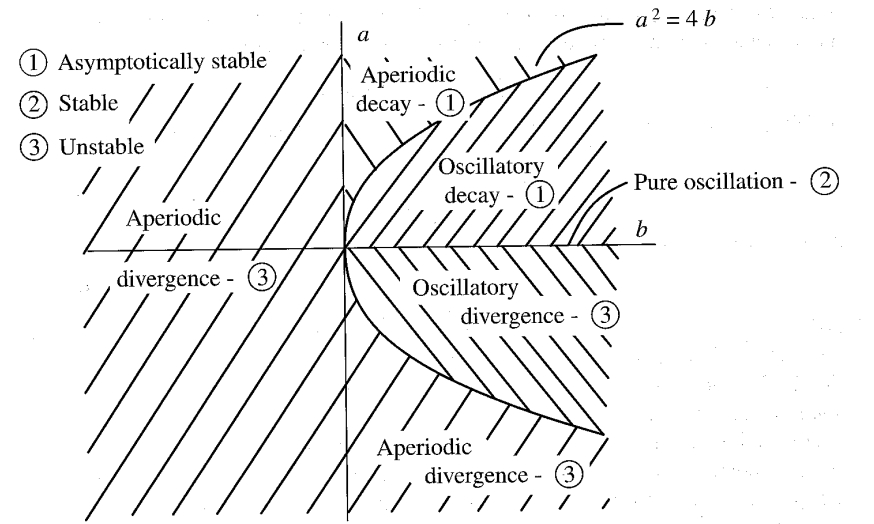
יציבות במישור הפרמטרי. (Meirovitch, 2001).
רטט חופשי ללא ריסון
נביט ברטט החופשי של המערכת הלא מרוסנת הבאה:
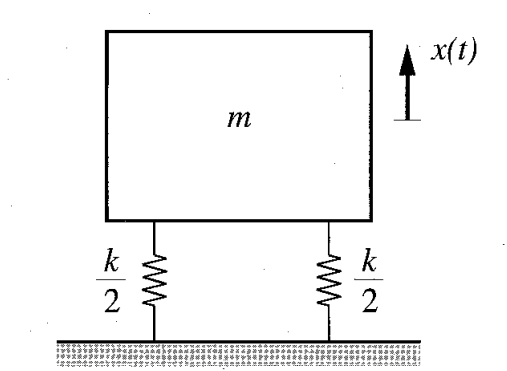
מערכת ללא ריסון וללא כוחות. (Meirovitch, 2001).
משוואת התנועה של מערכת זו היא:
כאשר
כאשר
הוא קבוע ממשי. הפתרון למשוואה זו תחת התנאי התחלה
הוא אקספוננציאל מהצורה:
אם נציב פתרון זה בחזרה במד”ר, ואז נחלק ב-
למשוואה זו שתי פתרונות מדומים טהורים:
לכן נוכל לרשום את הפתרון גם בצורה:
כאשר
כאשר
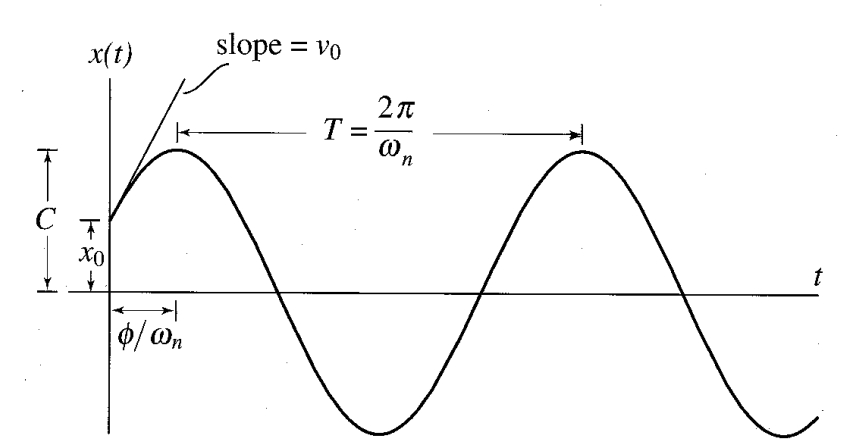
תגובה של מתנד הרמוני לעירור התחלתי. (Meirovitch, 2001).
כאשר נציב את תנאי ההתחלה, נמצא כי:
כך שהפתרון הוא:
רטט חופשי עם ריסון צמיגי
מערכת פשוטה עם ריסון צמיגי מוצגת באיור הבא:
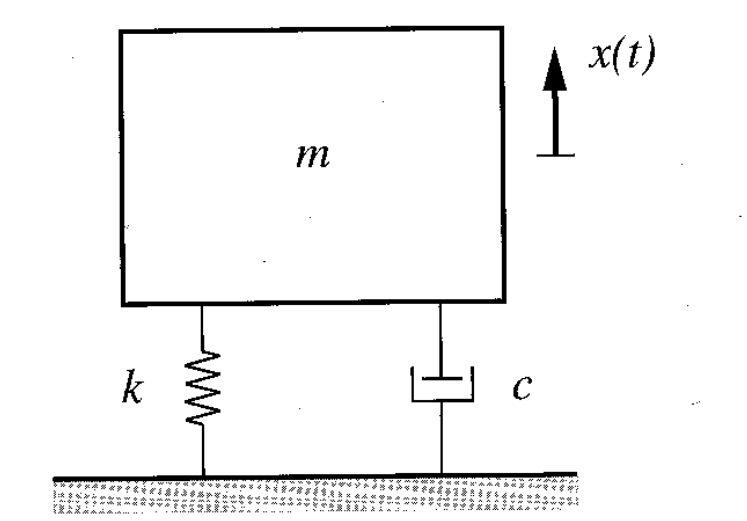
מערכת ללא כוחות, עם ריסון צמיגי. (Meirovitch, 2001).
משיווי משקל נקבל את משוואת התנועה:
כאשר
כאשר
הוא גודל חסר ממד הנקרא מקדם הריסון הצמיגי. הפתרון שלה הוא גם מהצורה:
אבל הפעם:
אופן התנועה סביב נקודת שיווי המשקל של המערכת תלויה בשורשים
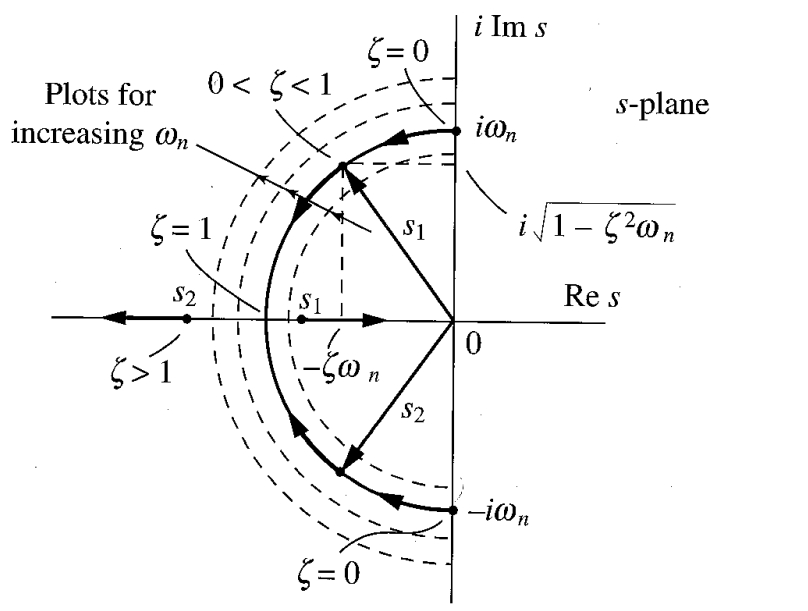
דיאגרמת מג”ש למערכת מרוסנת צמיגית. (Meirovitch, 2001).
נשים לב שמעצם הגדרת
נוכל גם לקשר בין
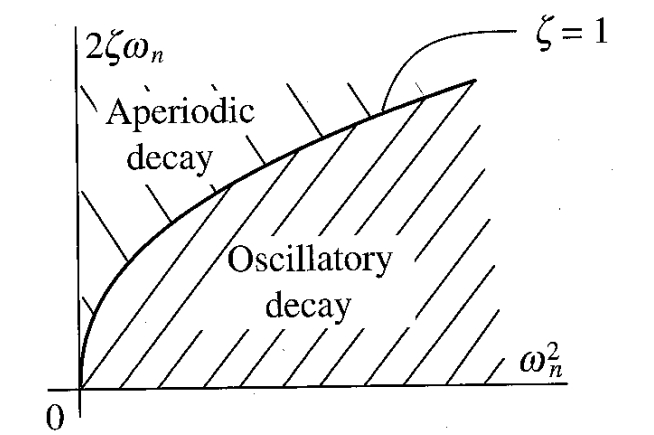
מישור פרמטרי למערכת מרוסנת צמיגית. (Meirovitch, 2001).
- עבור
, השורשים ו- תואמים לנקודות ו- על הציר המדומה של המישור לפלס, ולכל הציר האופקי של המישור הפרמטרי. מקרה זה מתאר תנודה הרמונית עם תדירות טבעית , כפי שראינו בפרק הקודם. - עבור
, השורשים ו- הם מרוכבים צמודים והם תואמים לזוג הנקודות במישור לפלס שממוקמים באופן סימטרי יחסית לציר הממשי. כאשר משתנה, הזוג נקודות נעים על החצי מעגל בעל רדיוס . נקודות אלו תואמות גם לאזור במישור הפרמטרי בין הציר האופקי לפרבולה . מהאיור לעיל של המישור הפרמטרי אנו יכולים להסיק כי מדובר בדעיכה תנודתית. המקרה של מוכר כתת-ריסון (underdamping). - עבור
, השורשים ו- מתלכדים לנקודה ב- על הציר הממשי של מישור לפלס, והם תואמים לפרבולה במישור הפרמטרי. מקרה זה נקרא ריסון קריטי והתנועה מתארת דעיכה לא-מחזורית. - לבסוף, עבור
, שני השורשים ו- ממוקמים על החלק השלילי של הציר הממשי במישור לפלס, עם בין הנקודה והמקור, ו- משמאל ל- . ככל ש- גדל, נוטה לשאוף ל- , בעוד נוטה לשאוף ל- . מקרה זה תואם לאזור בין הפרבולה והציר האנכי במישור הפרמטרי, ומתואר ע”י דעיכה לא-מחזורית. מקרה זה נקרא ריסון-יתר (overdamping).
עם סיווגים אלו אנו מקבלים תמונה איכותית על אופי המערכת, אבל אם אנו רוצים לקבל תמונה יותר כמותית, עלינו לפתור את המד”ר. אנו יודעים שהפתרון הכללי הוא מהצורה:
כאשר
לאחר פתרון מערכת משוואות זו נקבל ש:
ולכן הפתרון הכללי הוא:
נשים לב מה קורה בכל אחד מהסוגים השונים של הריסון:
-
עבור תת-ריסון,
, נהוג לרשום את השורשים בצורה הבאה: כאשר
נקרא תדירות הרטט המרוסן, מסיבות שיהיו ברורות בהמשך.
כאשר נציב את השורשים בפתרון הכללי, וניזכר ש-וגם , נקבל: כאשר
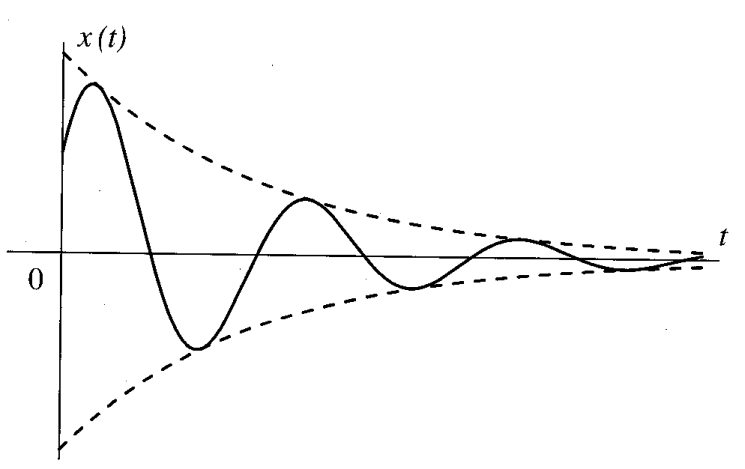
הוא האמפליטודה ו- הוא הפאזה של התגובה, עם הערכים: כדי לשרטט את התגובה של
כפונקציה של זמן, נהוג לפרק את הפתרון לשני גורמים, ו- . הגורם מתאר פונקציה דועכת אקספוננציאלית, והגורם הוא פונקציה הרמונית עם אמפליטודה ותדירות (במקום ), מה שמסביר את השם תדירות רטט מרוסן עבור .
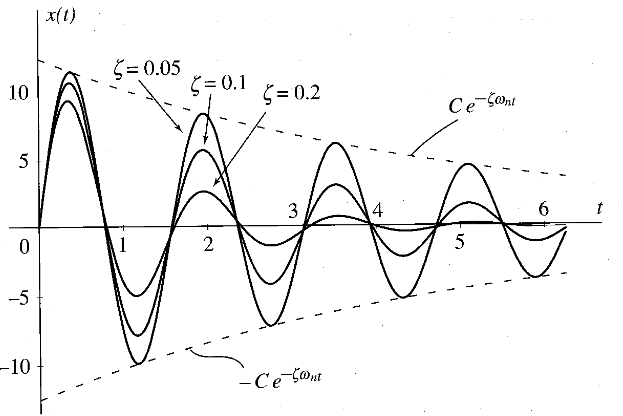
תגובה של מערכת תת-מרוסנת
. (Meirovitch, 2001). -
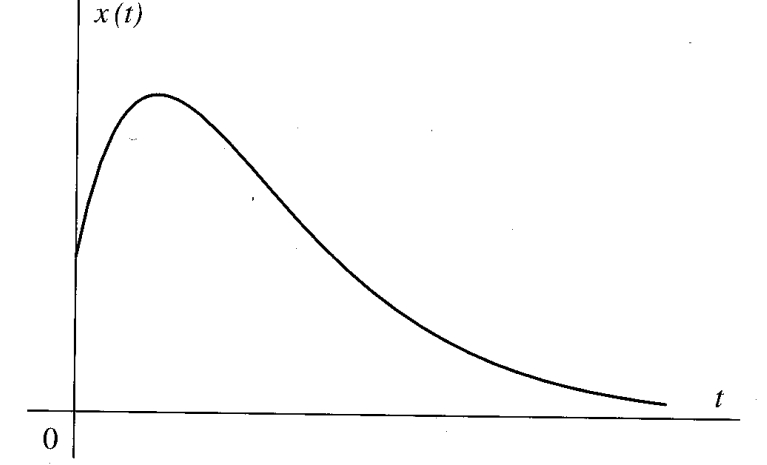
עבור ריסון-יתר,
, השורשים ו- נתונים לפי הביטוי שראינו עבורם במקרה הכללי: נשים לב ששני השורשים ממשיים ושליליים. לאחר הצבת שורשים אלו בחזרה בפתרון הכללי, נקבל את הגרף הבא עבור ערכים שונים של
:
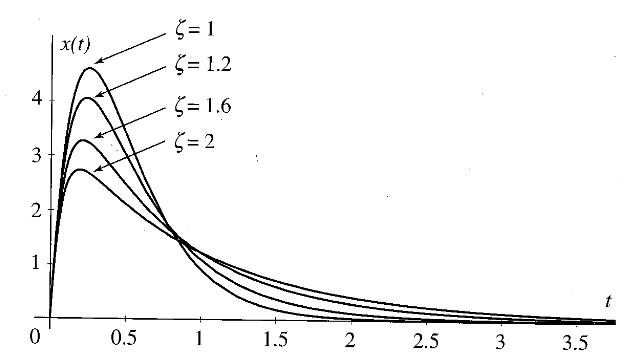
תגובה של מערכת מרוסנת קריטית (
) ומרוסנת יתר ( ). (Meirovitch, 2001). -
במידה והמערכת מרוסנת קריטית,
, היא מאופיינת ע”י השורשים: במקרה זה, התגובה יכולה להימצא יחסית די בקלות ע”י התמרת לפלס, מה שיוביל אותנו לתגובה:
שמתאר דעיכה לא-מחזורית. תגובה זו מתוארת גם בגרף לעיל.
שיטת האיזון האנרגטי
בהינתן מערכת עם ריסון שהוא לא בהכרח לינארי, למשל מהצורה:
למרות האי-לינאריות, בעזרת שיטות אנרגיה, נוכל בכל זאת לאפיין את המערכת, בערך. כאשר אנו מביטים ברטט חופשי של המערכות לעיל, אנו רואים שעבור תתי-ריסון אנו מקבלים תגובה סינוסואידית דועכת. הציר האנכי,
נשים לב שעם שיטה זו אנו מבצעים מספר הנחות:
- ניתן לקרב את התגובה המרוסנת של המערכת באמצעות פונקציה סינוסואידית:
- תדירות המערכת המרוסנת היא בקירוב תדירות המערכת הלא מרוסנת,
. - אמפליטודת התנודות דועכת לאט -
, כאשר הוא זמן מחזור ( עבור period). מה שאומר:
$$
\begin{aligned}
\dot{x} & \approx \cancel{ \dot{A}(t)\cos (\tau+\phi) }-A(t) \sin (t+\phi)\[1ex]
& =-A(\tau)\sin (t+\phi)
\end{aligned}
ממאזן אנרגיה בחלקיק, אנו יודעים שהעבודה של כוח לא משמר היא ההפרש בין האנרגיות:
עבור העבודה הלא משמרת שנסמן
הביטוי בצד ימין הוא במינוס, כי אם נסדר את
נביט בפרק זמן של מחזור, מרגע
שאת ביטוי זה שלפנו מההגדרה לעבודה
עבור השינוי באנרגיה, נניח שהזמן
במערכת הנתונה, משוואה
נפתח את האמפליטודה לאחר זמן מחזור בטור טיילור:
הפרש האנרגיות המתקבל:
כאשר הזנחו ביטויים ממעלה שנייה ומעלה.
נציב את
זוהי משוואה דיפרנציאלית שיש לפתור וממנה נקבל קירוב ל-מעטפת התגובה,
תזוזות קטנות משיווי משקל של מערכת עם דרגת חופש אחת
נביט במערכת עם דרגת חופש אחת, שמשוואת התנועה שלה לאחר לינאריזציה היא מהצורה:
כאשר
או, באופן מטריצי:
כאשר
הוא מטריצת המקדמים. כפי שראינו, אופי התנהגות המערכת סביב נקודת שיווי המשקל תלוי ב-
כאשר
והפתרון:
מפירוק מודלי נסיק שהמודלים (חלקי הפתרונות) של המערכת כך ש-
הם:
כאשר
במקרים שראינו (מערכת עם דרגת חופש אחת), המערכת הייתה חופשיה - לא פעלו עליה כוחות, כך שלא הייתה אפשרות למערכת להתבדר, והמקדמים
הערה:
הגרפים הבאים מתארים את התנהגות הנקודות שיווי משקל עבור ע”ע שונים במישור-
או מישור- , שהינם פשוט טרנספורמציות לינאריות של מישור- שאנו בדרך כלל רגילים אליו. אין צורך להתעמק יותר מדי במה זה או , פשוט הספר מתייחס לזה ככה כי הוא אוהב להיות מדויק בתיאורים הגרפיים שלו. ההבדל היחיד בין האיורים למישור- שאנו מכירים זה שצורת המסלולים אלוי תשתנה, אבל אופי ההתכנסות/התבדרות יישאר זהה.
כדי לאפיין מערכות יותר כלליות, נסווג את כלל האפשרויות של
-
הע”ע
ו- ממשיים ובאותו הסימן:
המודלים של המערכת הם:נוכל לקשור בין
ו- כדי לקבל את המשוואה הסתומה: שעבור תנאי התחלה
ו- שונים נוכל לשרטט אותה באופן הבא (במקרה שבו שני הע”ע העצמיים שליליים):
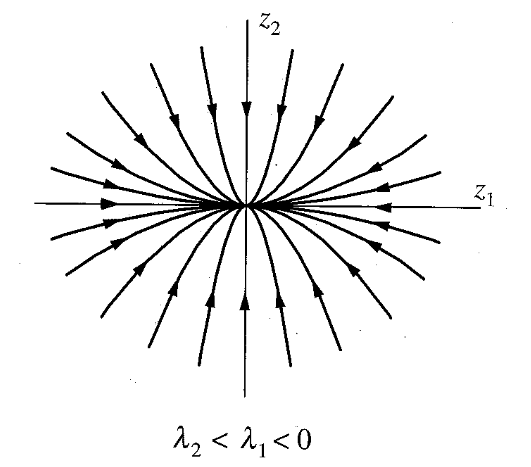
מסלולים במקרה של צומת יציב. כל מסלול הוא תנאי התחלה שונה - כמו בפתרון כללי למד”ר. (Meirovitch, 2001).
נקודת השיווי משקל המתוארת לעיל נקראת צומת. מכיוון שהמסלולים שואפים לשיווי משקל כאשר
, צומת זה הוא צומת יציב (SN - stable node). מהגדרה, צמתים יציבים הם יציבים אסימפטוטית. במידה ו- ו- חיוביים, ומקיימים , החיצים באיור לעיל פשוט הופכים כיוונים, והנקודה הופכת להיות צומת לא-יציבה (UN - unstable node). -
הע”ע
ו- ממשיים ובכיוונים שונים:
נניח ש-חיובי ו- שלילי. במקרה זה המסלולים מתוארים ע”י אם נשרטט אותם עבור תנאי התחלה
ו- שונים:
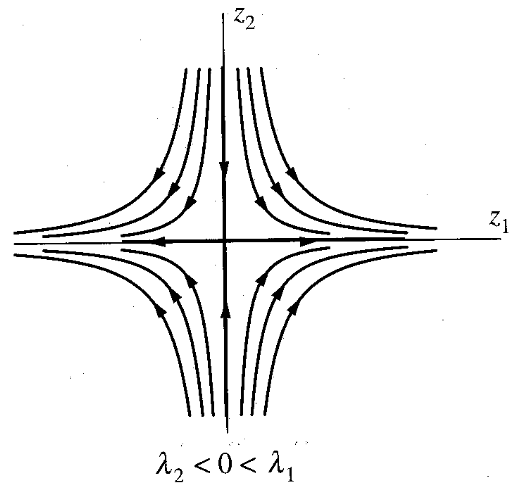
מסלולים במקרה של נקודת אוכף. (Meirovitch, 2001).
במקרה זה הנקודה נקראת נקודת אוכף (SP - saddle point), שהיא לא יציבה.
-
הע”ע
ו- מרוכבים צמודים, :
בהנחה ונסמן:המסלולים יהיו בצורה של ספירלה. עבור
, המסלולים מתכנסים לנקודת שיווי משקל, ואילו עבור ו- , המסלולים מתבדרים.
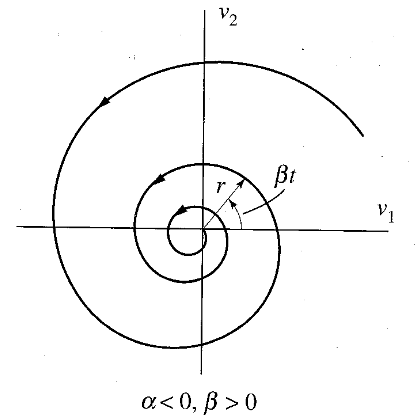
מסלולים במקרה של פוקוס יציב. (Meirovitch, 2001).
בשני המקרים, הנקודת שיווי משקל נקראת נקודת ספירלה, או פשוט פוקוס (focus). במקרה הראשון,
, הפוקוס הוא יציב אסימפטוטית (SF - stable focus), ובמקרה השני, , הפוקוס לא יציב (UF - unstable focus). -
הע”ע
ו- מדומים צמודים, :
זהו מקרה מיוחד של המקרה הקודם, במקרה בו. אנו נקבל קבוצה של עיגולים שמרכזם בנקודת המשקל. נקודה כזאת נקראת מרכז (C - center), שהיא רק יציבה.
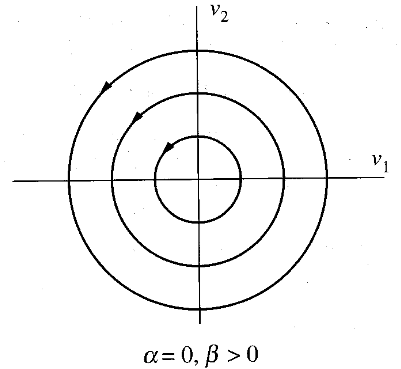
מסלולים במקרה של פוקוס מרכז. (Meirovitch, 2001).
נוכל לסווג את הסוגים השונים של נקודות שיווי המשקל גם על המישור הפרמטרי:
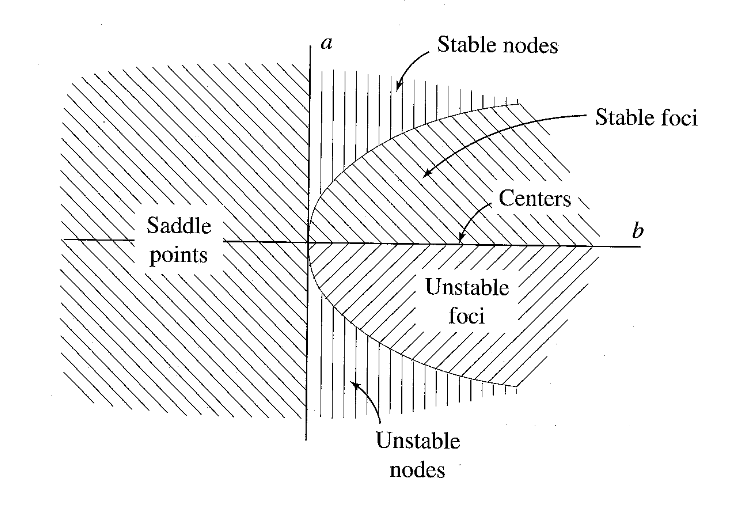
נקודות שיווי משקל במישור הפרמטרי. (Meirovitch, 2001).
ריסון קולון - חיכוך יבש
ריסון קולון מתרחש כאשר גופים מחליקים על מישורים יבשים. כדי שתנועה תחל, חייב להיות כוח הפועל על הגוף שמתגבר על ההתנגדות לתנועה הנוצרת ע”י החיכוך. החיכוך היבש מקביל למשטח ופרופורציונלי לכוח הנורמלי למשטח. במקרה של מסה-קפיץ באיור הבא, הכוח הנורמלי שווה למשקל
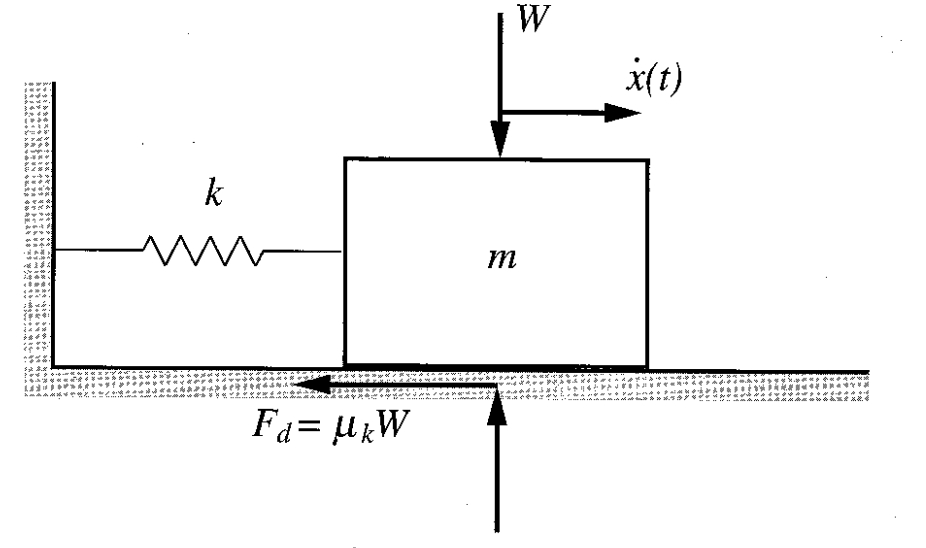
מערכת מסה-קפיץ הנתונה לריסון קולון. (Meirovitch, 2001).
קבוע הפרופורציה הוא מקדם החיכוך הסטטי
כיוון כוח החיכוך הוא מנוד בכיוונו למהירות, ונשאר קבוע בגודלו כל עוד הכוחות שפועלים על המסה
נסמן ב-
כאשר הסימון
מתמטית, ניתן לתאר את הפונקציה הזאת כ:
המד”ר שקיבלנו לעיל היא לא לינארית, אבל נוכל להפריד אותה לשתי משוואות לינארית, אחת לערכים חיוביים של
הפתרון למשוואות אלו ניתנות למציאה בפרקי זמנים, כל פעם פרק זמן אחד, כתלות בסימן של
כאשר
שמייצג תנודה הרמונית על תגובה ממוצעת
נמשיך כעת לפתור עבור פרק הזמן הבא, עבור
ביחס לפתרון הקודם, האמפליטודה של הגורם ההרמוני קטן יותר ב-
נוכל להמשיך את תהליך זה, אבל מהר מאוד נמצא תבנית לכל פרקי הזמן. לאורך כל חצי מחזור התנועה מורכבת מגודל קבוע השווה לערך הממוצע של הפתרון ומגורם הרמוני עם תדירות השווה לתדירות הטבעית
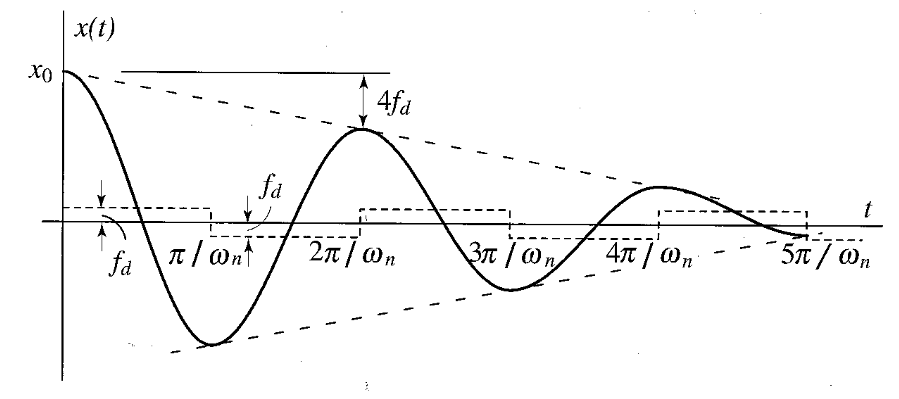
תגובה של מערכת הנתונה לריסון קולון. (Meirovitch, 2001).
התנועה מפסיקה בפתאומיות כאשר ההעתקה בסוף של חצי מחזור לא גבוהה מספיק בשביל הקפיץ כדי להתגבר על החיכוך הסטטי. זה מתרחש בסוף חצי מחזור עבורו האמפליטודה של הגורם ההרמוני קטן יותר מ-
תרגילים
תרגיל 1
נתון חרוז בעל מסה
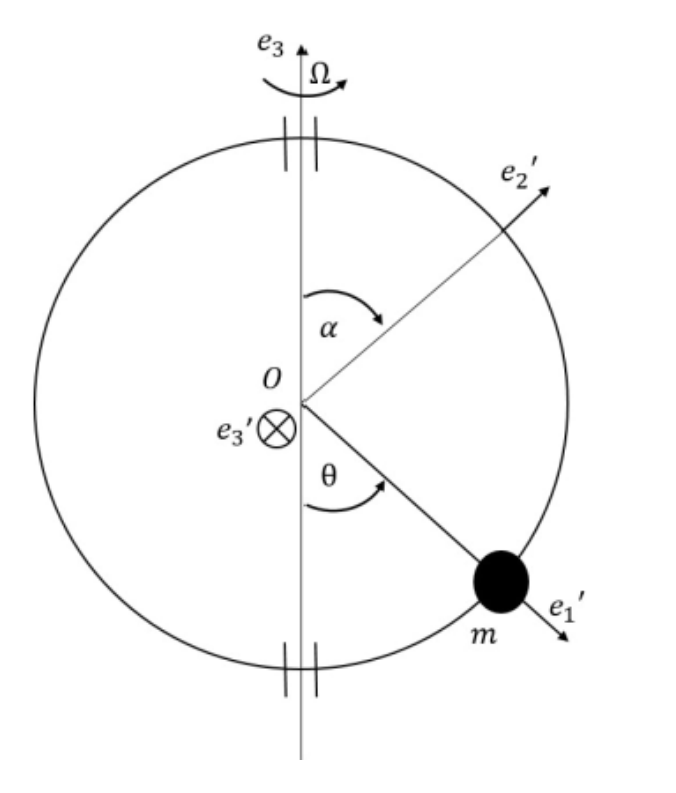
סכימת המערכת
סעיף א’
הרכיבו את משוואות התנועה של המערכת באופן לגראנז’י.
פתרון:
נגדיר מערכת צירים מקומית
נשים לב ש:
ולכן:
המיקום של החרוז:
נגזור לפי כלל האופרטור:
נציב במשוואות לגראנז’:
נקבל את משוואת התנועה:
סעיף ב’
נרמלו את משוואות התנועה.
פתרון:
נגדיר את הגדלים הבאים:
- תדירות עצמית של החרוז בעקבות אילוצי הכבידה ורדיוס הסיבוב:
- הזמן הנדרש להשלמת מחזור אופייני:
- יחס המהירות הזוויתית הכוללת של החרוז לתדירות העצמית שלו:
נפתח את משוואת התנועה המנורמלת: נשים לב ש- הוא הנגזרת השנייה של לפי , שאנו מעוניינים לנרמל גם אותו (לפי ). נראה כי: כאשר .
נציב בחזרה במשוואת התנועה כדי לקבל:
סעיף ג’
חשבו את נקודת שיווי המשקל של המערכת.
פתרון:
נדרוש ש-
ערכי
סעיף ד’
חקרו את יציבות המערכת סביב נקודות שיווי המשקל.
פתרון:
נבטא את משוואת התנועה כמערכת משוואות לא-לינאריות מסדר ראשון. נבחר:
ולכן מערכת המשוואות:
נרצה לבצע לינאריזציה למערכת. נסמן:
היעקוביאן שלו:
ולכן:
כדי לסווג את נקודות שיווי המשקל נרצה למצוא את הע”ע שלהם:
נבחן את יציבות נקודות השיווי משקל:
- אם
:
נקבל שנפרק למקרים: - אם
, כאשר :
נקבל שנשים לב ש- הוא הוא , אבל עבור .
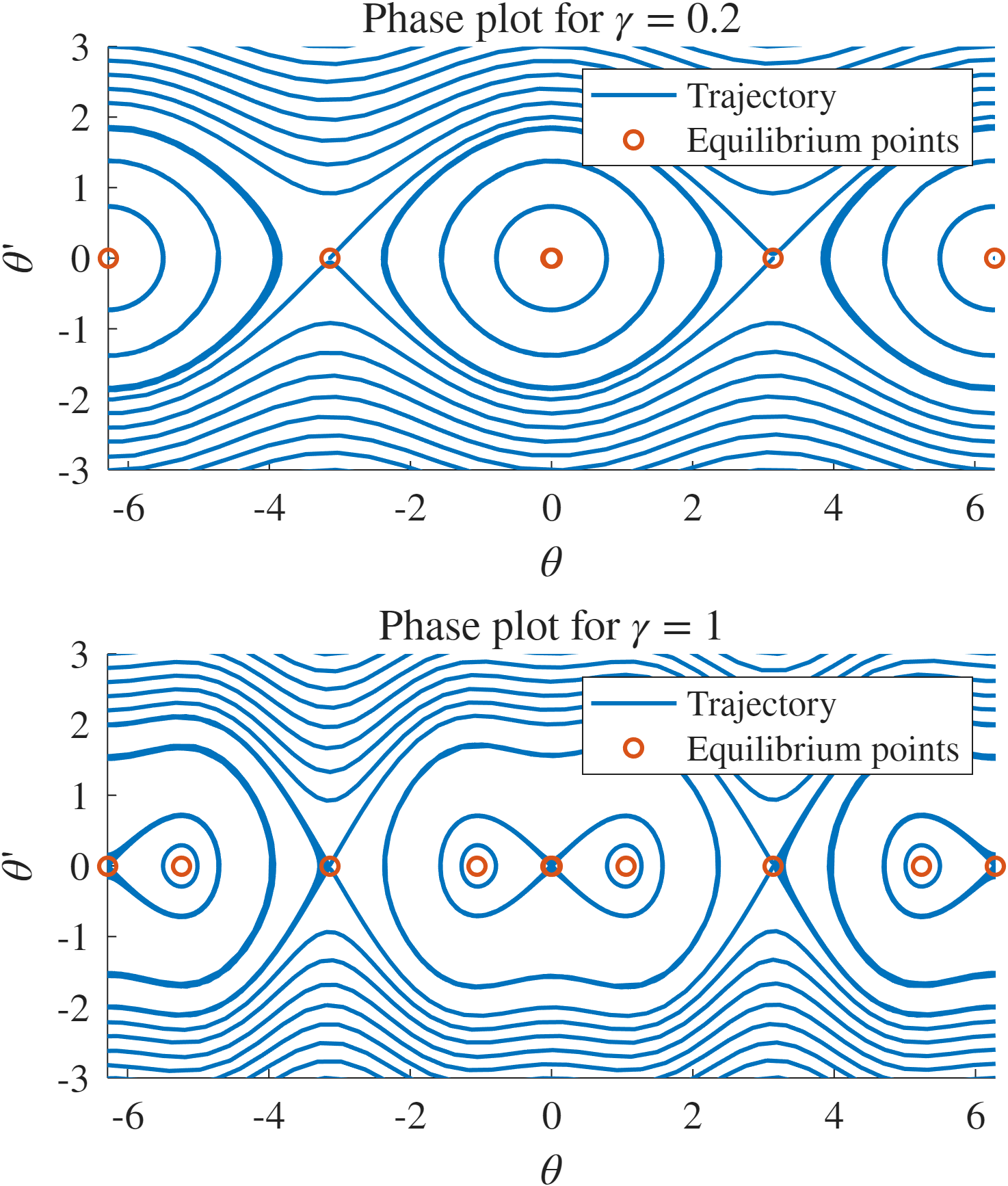
דיאגרמת פאזות עבור ערכי
שונים של המערכת.
הקוד נמצא בGitHub.
תרגיל 2
נתון חרוז מאולץ לנוע על מוט ומחובר לשני קפיצים עם אורך חופשי

סכמת הבעיה.
סעיף א’
מצא את משוואות התנועה של המערכת.
פתרון:
נשים לב כי כל הכוחות סימטריים יחסית ל-
כאשר האורך
וגם:
נציב ונקבל את משוואת התנועה:
סעיף ב’
נרמל את משוואות התנועה.
פתרון:
נגדיר קבועים אל-ממדיים:
- תדירות עצמית של המערכת -
. - זמן מנורמל, הזמן להשלמת מחזור -
. - יחס הממדים הגאומטריים של המערכת -
. - יחס כבידה לקשיחות המערכת
.
בנוסף, לנוחיות:
נקבל:
ולכן:
סעיף ג’
מצא נקודות שיווי משקל של המערכת ובצע לינאריזציה.
פתרון:
את משוואת התנועה אנו יכולים לרשום באופן:
כאשר את צד ימין אנו מסמנים בפונקציה
נאפס את הנגזרות לפי משתנה הזמן המנורמל, כלומר,
נפתור נומרית (MATLAB). נקבל שאחת מנקודות השיווי משקל היא
לכן המשוואה הלינארית היא פשוט:
הערכים העצמיים:
עבור
עבור
סעיף ד’
חקור את תגובת המערכת ומצא את מעטפת התגובה.
פתרון:
משוואת התנועה שלנו:
מפני שהריסון לא לינארי לא ניתן לחשב פתרון אנליטי מדויק של התגובה. לכן נבצע מספר הנחות ונבטא את מעטפת התגובה בעזרת שיטת האיזון האנרגטי.
בהזנחת כבידה והנחת קפיץ קצר, כלומר:
נניח כי:
- אמפליטודת התנודות היא קטנה -
, ולכן: - ניתן לקרב את התגובה המרוסנת של המערכת באמצעות פונקציה סינוסואידית:
- תדירות המערכת המרוסנת היא בקירוב תדירות המערכת הלא מרוסנת,
. - אמפליטודת התנודות דועכת לאט -
, כאשר הוא זמן מחזור ( עבור period). מה שאומר:
$$
\begin{aligned}
z’ & \approx \cancel{ A’(\tau)\cos (\tau+\phi) }-A(\tau) \sin (\tau+\phi)\[1ex]
& =-A(\tau)\sin (\tau+\phi)
\end{aligned}
כעת יש לנו:
נסמן את כוח הריסון ב-
לפי שיטת האיזון האנרגטי, העבודה שמבצע כוח הדיסיפציה במחזור אחד שווה לאיבוד האנרגיה הקינטית במחזור אחד. נחשב את עבודת כוח הדיסיפציה במחזור אחד, כלומר בין
נציב את צורת הפתרון שהנחנו:
מאחר ואנו מבצעים אינטגרציה על פונקציה מחזורית בזמן מחזור, לפאזה אין השפעה על האינטגרל, כך שנוכל ל”התעלם” ממנה:
מפני שאמפליטודת התנודות דועכת לאט נוכל להוציא אותה מתוך האינטגרל:
כעת נחשב את האנרגיה הפוטנציאלית בתחילת ובסוף המחזור. בהנחה ויש נקודת קיצון ב-
נשים לב שמפני שהמערכת מנורמלת מתקבל ביטוי שתלוי באופן פשוט באמפליטודה.
נפתח את האנרגיה הפוטנציאלית לאחר זמן מחזור בטור טיילור:
הפרש האנרגיות המתקבל:
השינוי באנרגיה הפוטנציאלית הוא כתוצאה מעבודת הכוח הבלתי משמר. כלומר,
פתרון המשוואה הדיפרנציאלית יניב את מעטפת הדעיכה:
כאשר את

מעטפת הדעיכה עבור
, .
הקוד נמצא בGitHub.