מבוא
בפרק קודם ראינו כיצד אנו מאפסים את אות השגיאה במצב מתמיד
ביצועים במצב מתמיד
מעקב אחר אות ייחוס
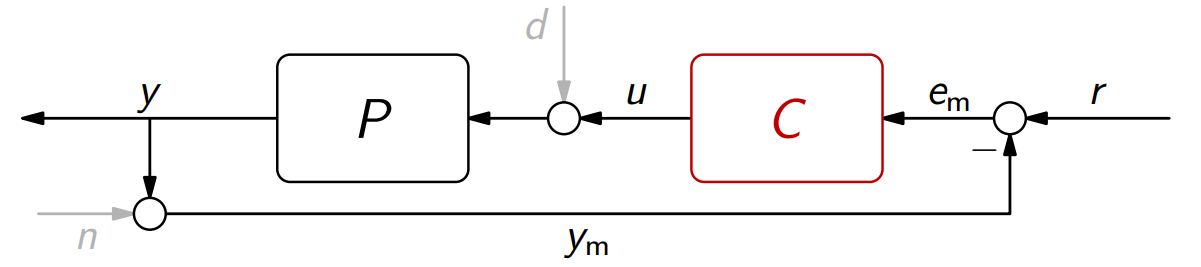
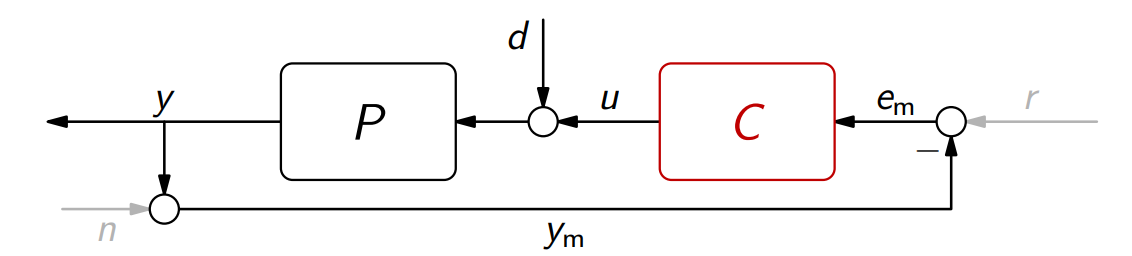
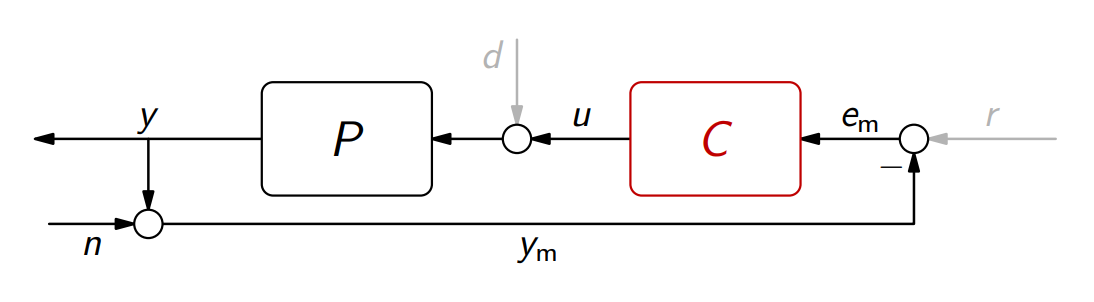
נביט במערכת הבאה:
נסמן ב-
כאשר
לכן פונקציית הרגישות מקיימת:
כאשר נזכור ש-
נסמן את פונקציית התמסורת של החוג הסגור כ-
ולכן, לפי אי שוויון המשולש:
אנו רוצים להבטיח ש-
אז
לכל
בגדול, כדי לקבל מעקב אחר אות ייחוס במצב מתמיד טוב, נדרוש ש-
הפחתת הפרעות
באותו אופן, כאשר נתמקד בהפרעה:
נסמן ב-
כאשר
לכן, פונקציית הרגישות להפרעה צריכה לקיים:
כאשר נזכור ש-
כעת, באותו אופן כמו במקרה הקודם, נשים לב שנצטרך הפעם לדרוש:
ואז נקבל ש:
לכל
שוב, , כדי לקבל הפחתת הפרעות במצב מתמיד טובה, הגבר גבוה בחוג, בטווח התדירויות
רגישות לרעש מדידה
נסמן ב-
כאשר
לכן, פונקציית הרגישות המשלימה צריכה לקיים:
כאשר נזכור ש-
כיוון ש:
אם נדרוש
ואז באמת:
לכל
בגדול, כדי לקבל רגישות נמוכה לרעשי מדידה במצב מתמיד, נדרוש הגבר נמוך בחוג בטווח התדירויות
עיצוב חוג
ראינו שמצד אחד, אנו צריכים הגבר גבוה בחוג, עבור
- אותות ייחוס הן “איטיות”, יענו
בתדרים נמוכים. - רעש מדידה הוא “מהיר”, יענו
בתדרים גבוהים.
בנוסף, מאחר ורוב התהליכים הפיזיקליים הם low-pass, אנו צריכים לדאוג רק מהפרעות “איטיות”.
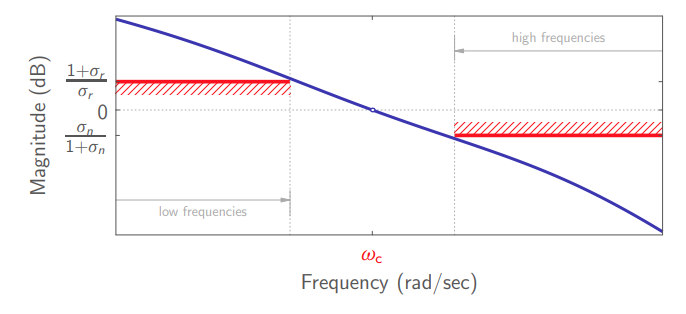
לכן, נרצה לעצב את החוג עם:
- הגבר חוג גבוה,
, בתדרים “נמוכים”. - הגבר חוג נמוך,
, בתדרים “גבוהים”.
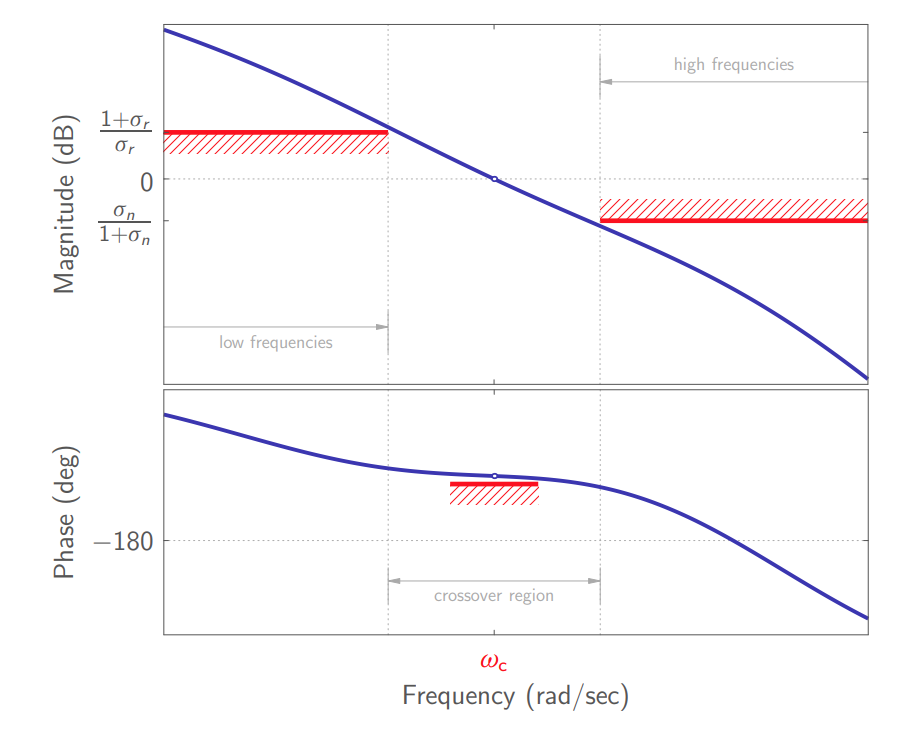
כלומר, נרצה שהגרף בודה של
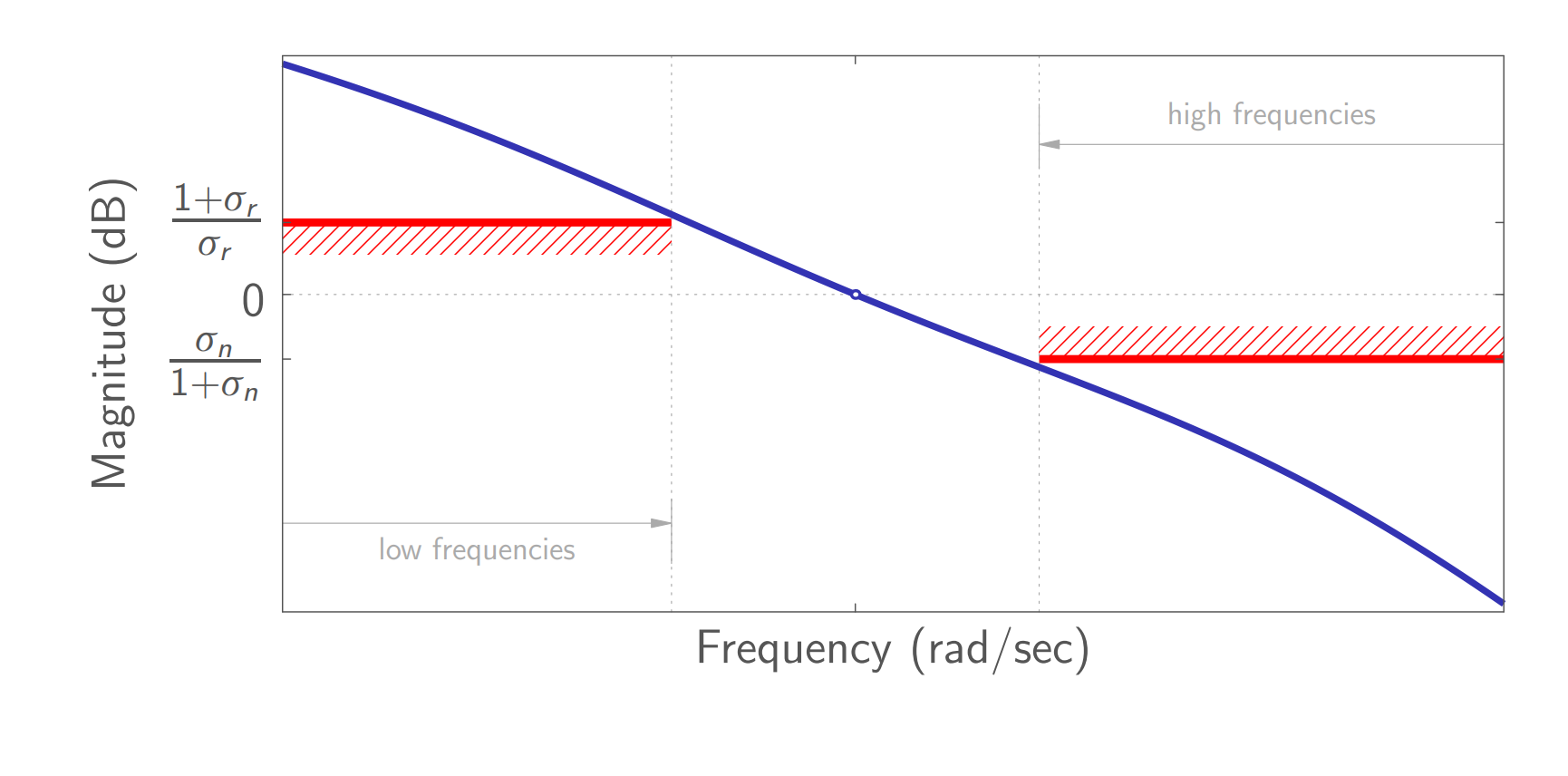
צורת גרף בודה-הגבר של
רצויה. נשים לב שיש אזור בו הגבר החוג הוא לא גבוה ולא נמוך. (Leonid Mirkin’s Homepage, n.d.).
לאופן תכן זה אנו קוראים עיצוב חוג (loop shaping).
ביצועים בתגובת מעבר
אנו בעיקר מעוניינים בביצועי תגובת המעבר של אות היחוס:
ואנו מודדים אותו על בסיס תגובת מדרגה (המהירות שלה ומידת החלקלקות שלה).
אנו יודעים מניתוח תגובת תדירות שמאפייני תגובת המעבר במישור הזמן והתדירות הם:
- ככל שרוחב הפס של
יותר רחב, תגובת המדרגה יותר מהירה. - ככל ששיאי הרזוננס של
יותר גבוהים, נקבל תגובת-יתר או תגובת חסר יותר גדולה (overshoot ו-undershoot).
נוכל לבטא את תנאים אלו על
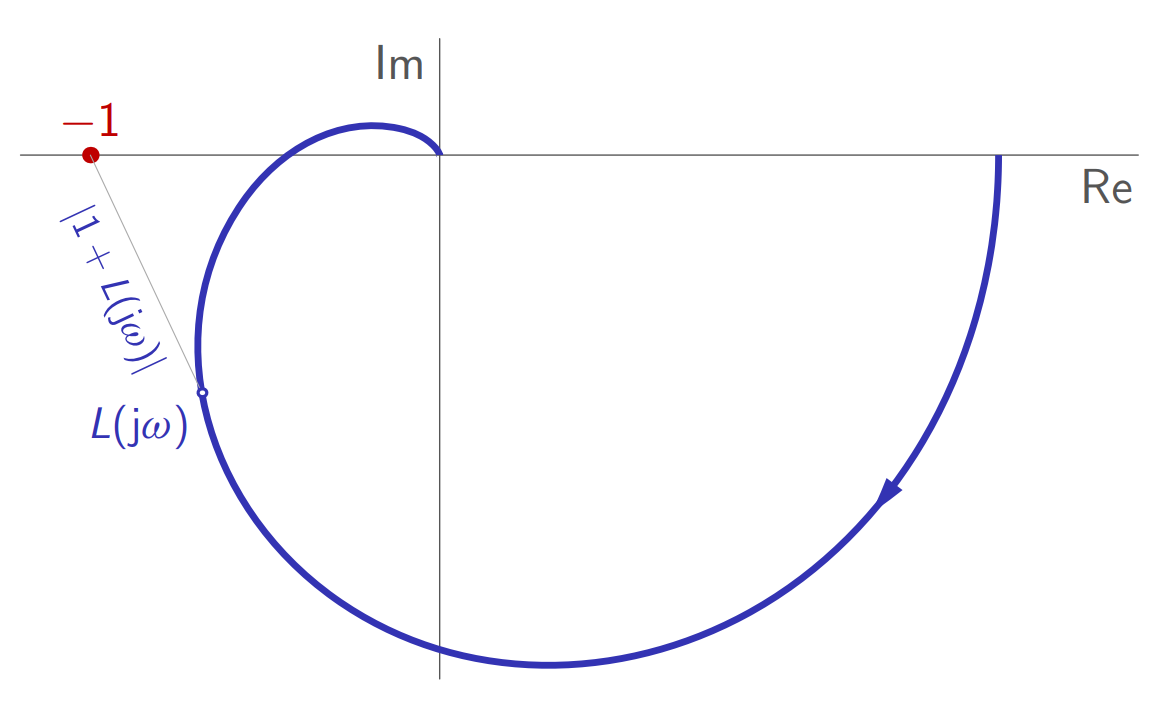
גרף פולארי של
. (Leonid Mirkin’s Homepage, n.d.).
לכן, ככל ש-
לערכי
הגרף הפולארי של
הנתון. (Leonid Mirkin’s Homepage, n.d.).
והגרף בודה-הגבר של
הגרף בודה-הגבר של
עבור ה- הנתון. (Leonid Mirkin’s Homepage, n.d.).
אזור מעבר ותדירות מעבר
כאשר
אזור מעבר ותדירות מעבר. (Leonid Mirkin’s Homepage, n.d.).
על הדרך, הוא עובר את האזור עם
יכולות להיות יותר מתדירות מעבר אחת.
אנו נרצה לעצב את
אופן עיצוב
אידיאלי. (Leonid Mirkin’s Homepage, n.d.).
מאמץ בקרה בחוג סגור
מאמץ בקרה במצב מתמיד
עבור המערכת הבאה:
נזכור ממשוב יחידה ש:
לכן, המאפיינים של האות בקרה בחוג סגור תלויים במאפיינים של
מבחינת האות ייחוס:
מאחר ו:
המאפיינים של
למשל, אם גם
מבחינת הרעש מדידה:
אם
מבחינת ההפרעות:
נרצה כמו מקודם להימנע מהגברים גבוהים של
תרגילים
תרגיל 1
הביטו במשוב יחידה לעיל. האם הדרישות הבאות סותרות אחת את השנייה?
1.
-
כאשר הוא ההשפעה של אות הייחוס על שגיאה המעקב , הוא ההשפעה של רעש ההפרעה עליו, ו- הוא ערך הספקטרום של אות בתדירות .
פתרון:
נשים לב כי מעצם הגדרת השגיאה
עבור המקרה הראשון:
עבור הדרישה הראשונה, נעביר אגף:
באותו אופן, עבור השגיאה התחתונה:
נחבר ביחד את שתי האי שוויונות:
קיימת סתירה, ולכן הדרישה לא אפשרית.
עבור המקרה השני:
במקרה זה אין סתירה, מכיוון ששני התנאים בכלל לא על אותם התדרים החופפים.
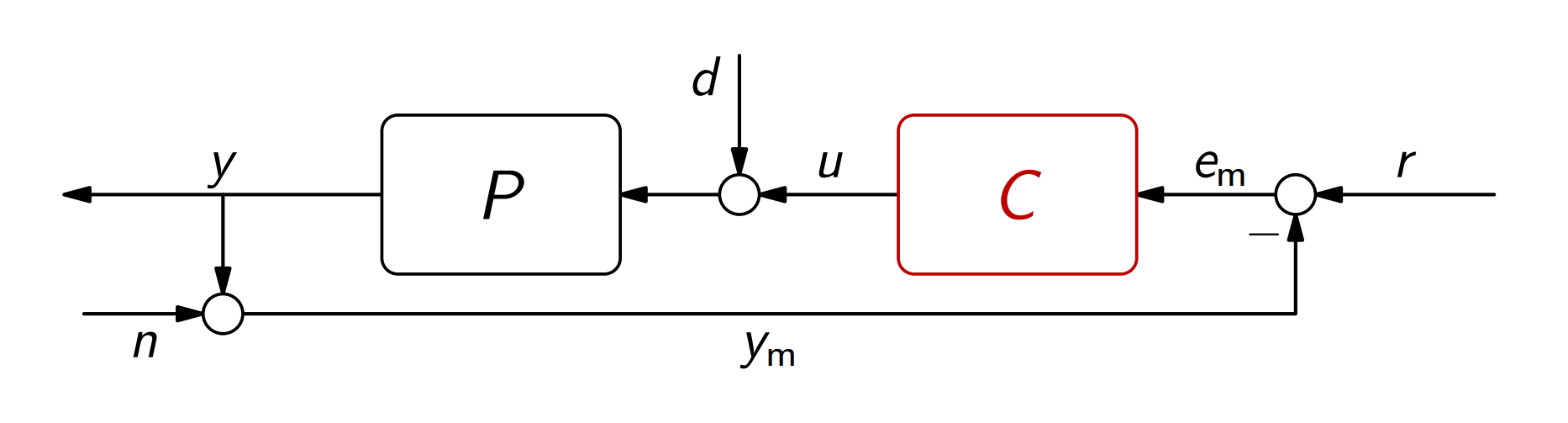
תרגיל 2
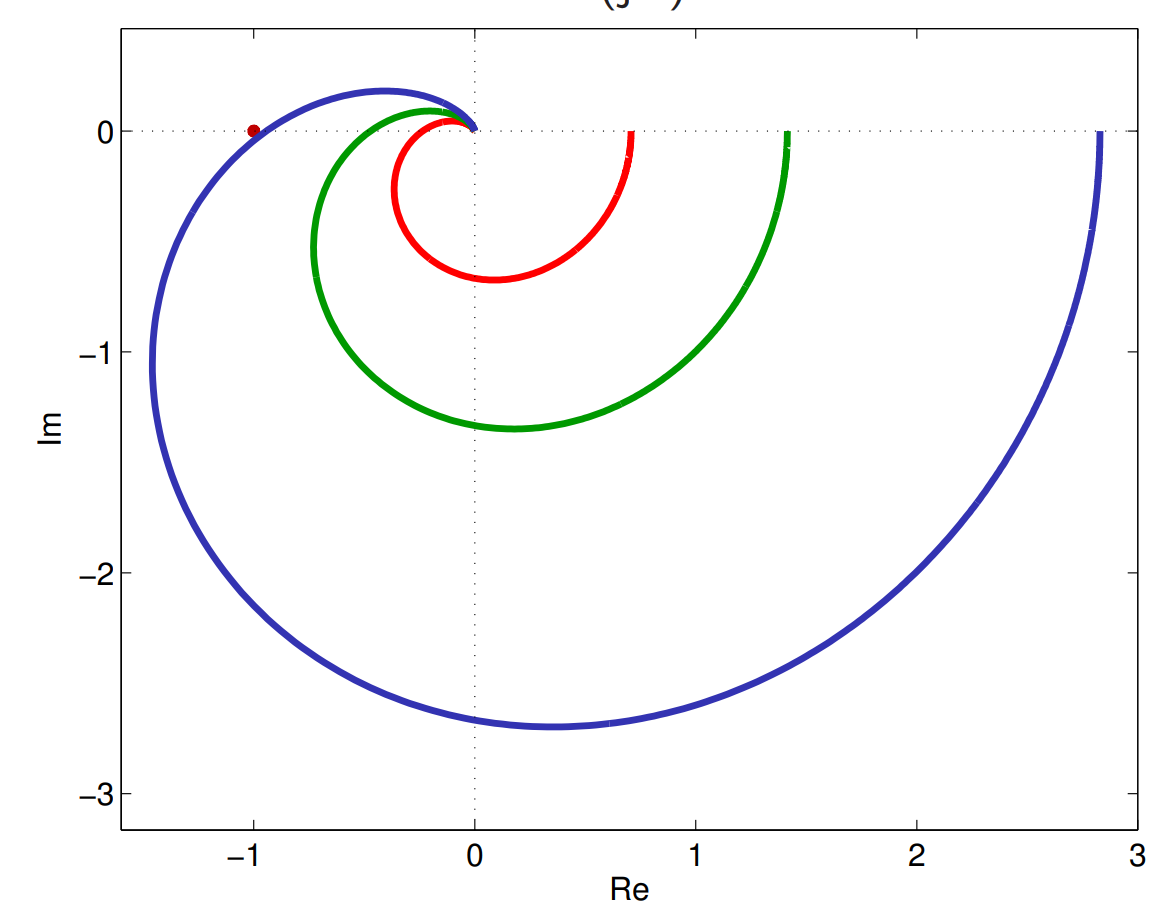
האיור הבא מתאר את הדיאגרמות הפולאריות של ארבעה תגובות תדירות של החוגים
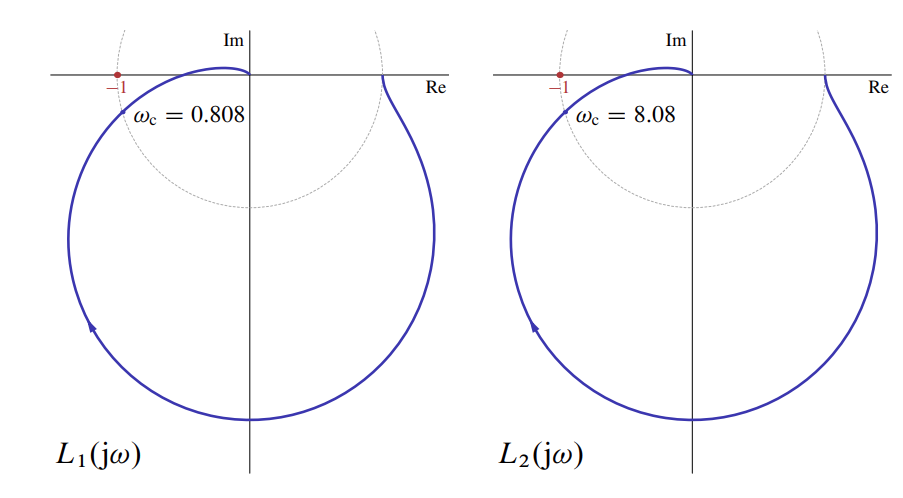
דיאגרמות פולאריות של
. (Leonid Mirkin’s Homepage, n.d.).
סעיף א’
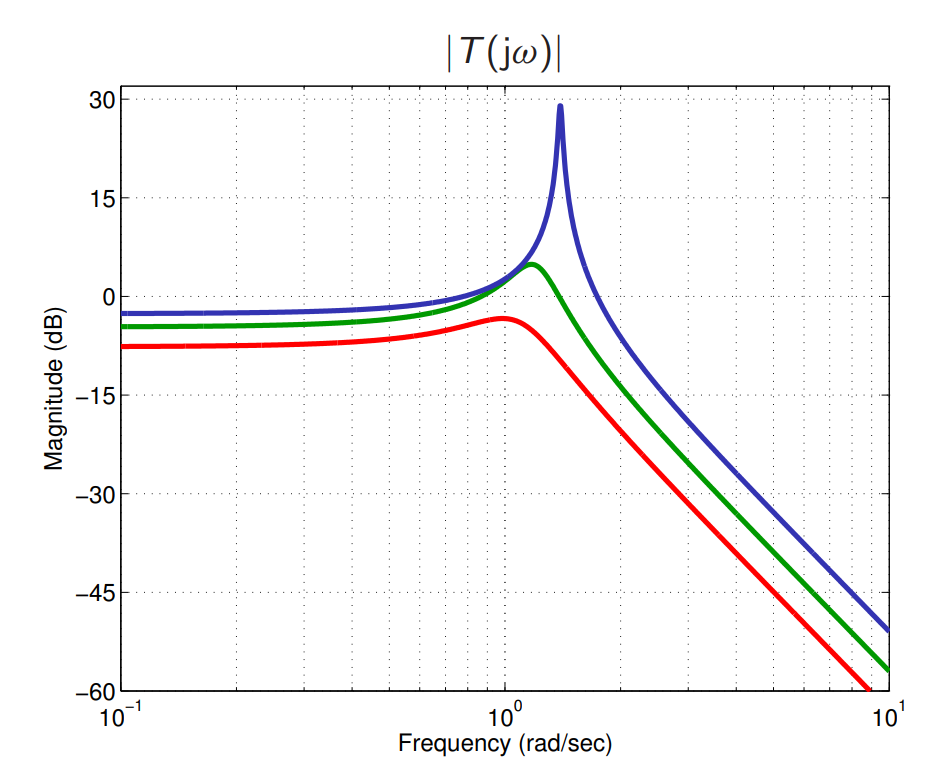
הגרפים הבאים הם גרפי בודה של פונקציות רגישויות משלימות
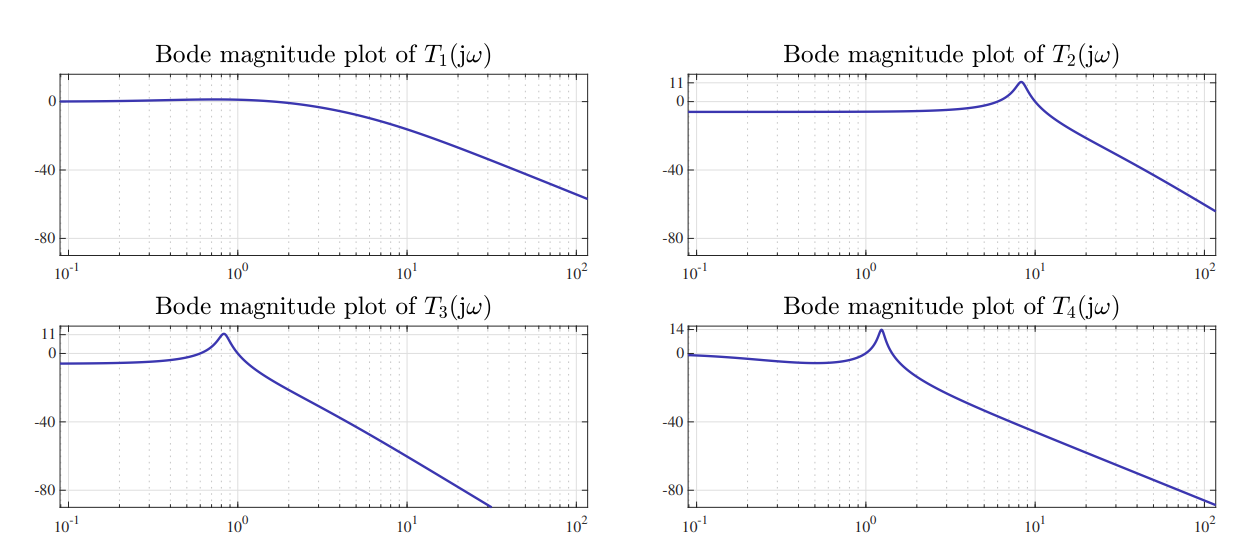
דיאגרמות בודה-הגבר של
. (Leonid Mirkin’s Homepage, n.d.).
פתרון:
תדרי רזוננס מופיעים בעקומים פולאריים
נשים לב ש-
סעיף ב’
הגרפים הבאים הם תגובות תדירות של פונקציות רגישות
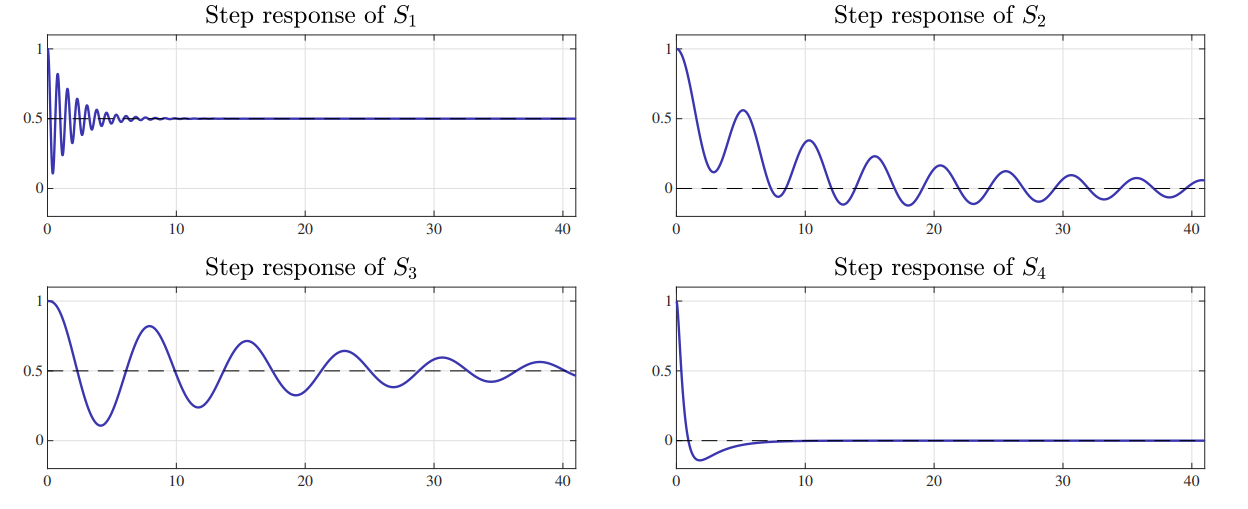
תגובות מדרגה של
. (Leonid Mirkin’s Homepage, n.d.).
פתרון:
ככל שנתקרב לנקודה הקריטית, כך נתקרב למצב בו יהיה לנו קוטב בסביבת
התדר הכי מהיר הוא ב-
הבא אחריו הוא ב-
התדר האיטי ביותר הוא ב-
ל-
עוד רמז להתאמה הוא ערך השגיאה במצב מתמיד.
תרגיל 3
הביטו במערכת הבאה (שוב):
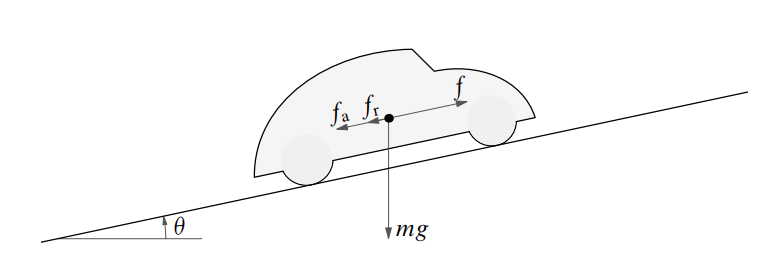
המערכת הנתונה על הרכב. (Leonid Mirkin’s Homepage, n.d.).
כפי שכבר ראינו, המודל לאחר לינאריזציה של המערכת, סביב נקודת שיווי משקל
סעיף א’
נרמלו את אות הבקרה והיציאה כך שלתהליך יש הגבר יחידה.
פתרון:
ננרמל לפי
נקבל:
כעת, לתהליך
גם את אות הייחוס ננרמל לפי
בענף המשוב נרצה להעיף את הכפל ב-
סעיף ב’
מצאו את רוחב הפס של התהליך המנורמל ושל הפונקציית רגישות משלימה
פתרון:
רוחב הפס הוא התדר בו
עבור פונקציית הרגישות, נשים לב כי:
ולכן רוחב הסרט:
עבור התהליך המנורמל:
כאשר נשווה ל-
סעיף ג’
מצאו את אות הבקרה (עבור כניסה מדרגה) ב-
פתרון:
נמצא את אות הבקרה:
לפי משפט הערך ההתחלתי לכניסת מדרגה (
ננסה לבטא את
נשים לב שמתחבא לנו כאן
נבודד את
כלומר ככל שהתדר
סעיף ד’
שרטטו את גרף הבודה של
פתרון:
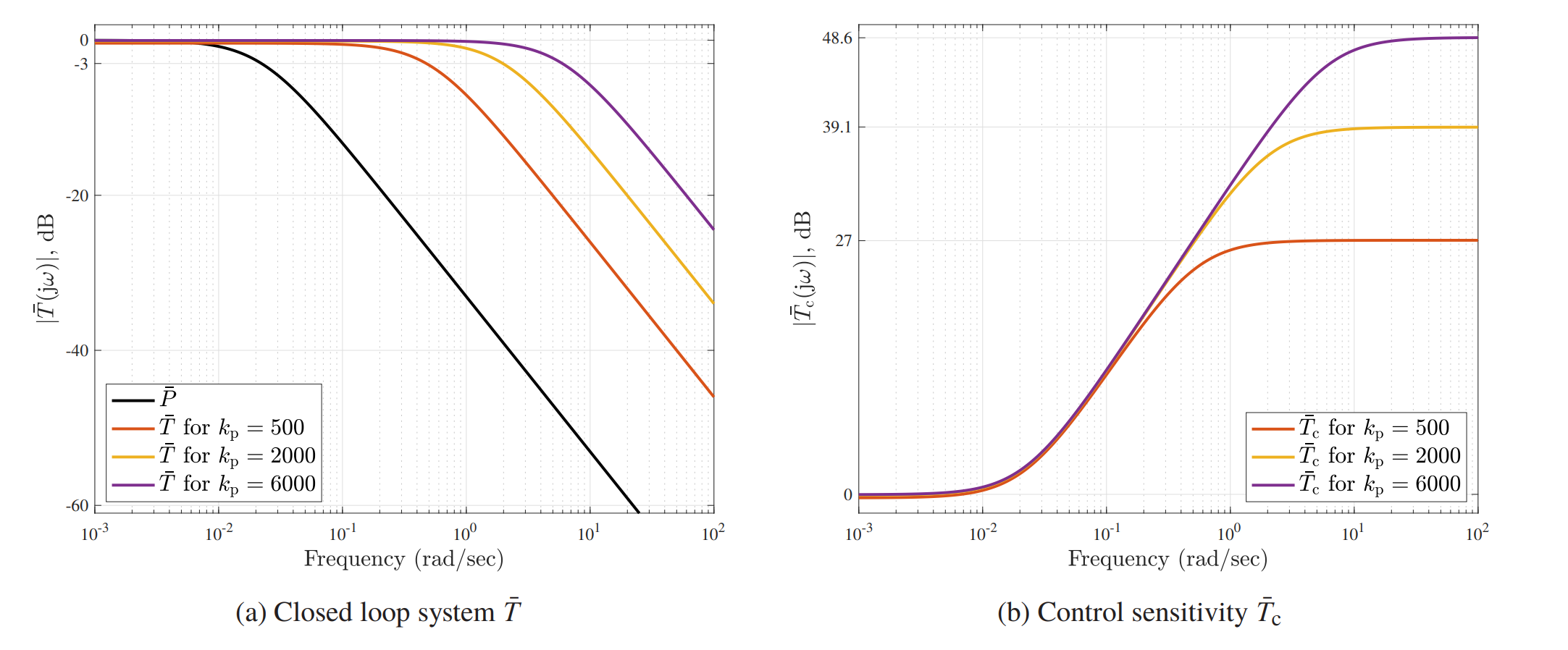
דיאגרמות בודה לתנאים בשאלה. (Leonid Mirkin’s Homepage, n.d.).
נשים לב שככל שמגדילים את