מבוא (תמים) למשוב
משוב יחידה
יהי
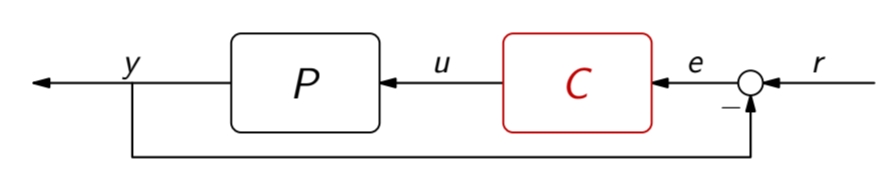
בסכמה זו האות המבוקר
מהתרשים לעיל נסיק כי:
מאחר וגם
לכל אחד מהתהליכים הבאים ניתן שמות:
ל-
נניח מעתה ואילך ש-
ניתן לחשוב
- על
כמקביל ל- מבקרה בחוג פתוח. - על
כמקביל ל- מבקרה בחוג פתוח.
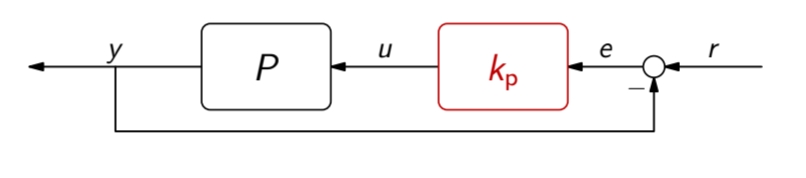
דוגמה: בקר סטטי בהגבר גבוה
נשים לב שאם נבחר
עבור הגבר מסוים :
אז:נשים לב שאם
, אז , שזה כמעט זהה ל- מבקרה בחוג פתוח. יצרנו פה היפוך תהליך בבקרה בחוג סגור, רק שהפעם, המבקר שלנו לא תלוי ב- .
השפעת הפרעות
כעת נניח שיש הפרעה במערכת:
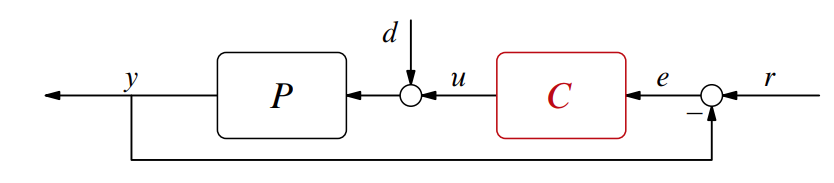
כעת התווסף לנו עוד תהליך במערכת:
ל-
ארבעת המערכות
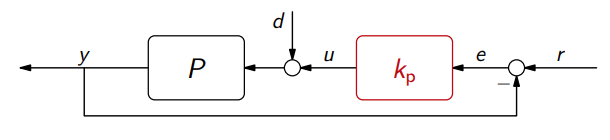
דוגמה: בקר סטטי בהגבר גבוה והפרעות
נבחר שוב
עבור הגבר מסוים :
אז:נשים לב שאם
, אז , שבעצם אומר ש- , ואז, שוב, . אז, בערך אפשר לומר ש
למרות שבמשוב אנו לא מודדים (ישירות) את ההפרעה.

רעש מדידה
כאשר אנו מודדים אות מסוים, אין סיכוי שלא יתווסף למדידה עצמה מידה מסוימת של רעש, אותו נסווג כרעש מדידה
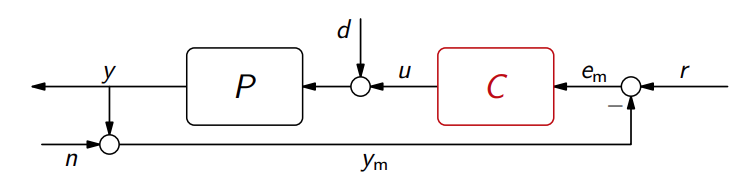
האות החדש מקושר באופן הבא:
נוכל לסכם את ההשפעות של כלל האותות כניסה באופן הבא (צריך לזכור את זה למבחן):
דוגמה:
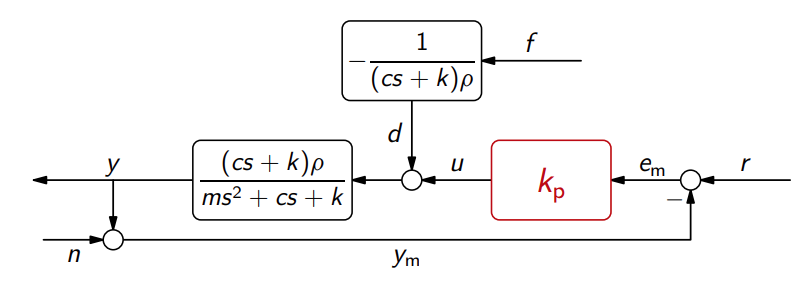
נתונה המערכת הבאה:
עם הבקר בחוג סגור הבא:
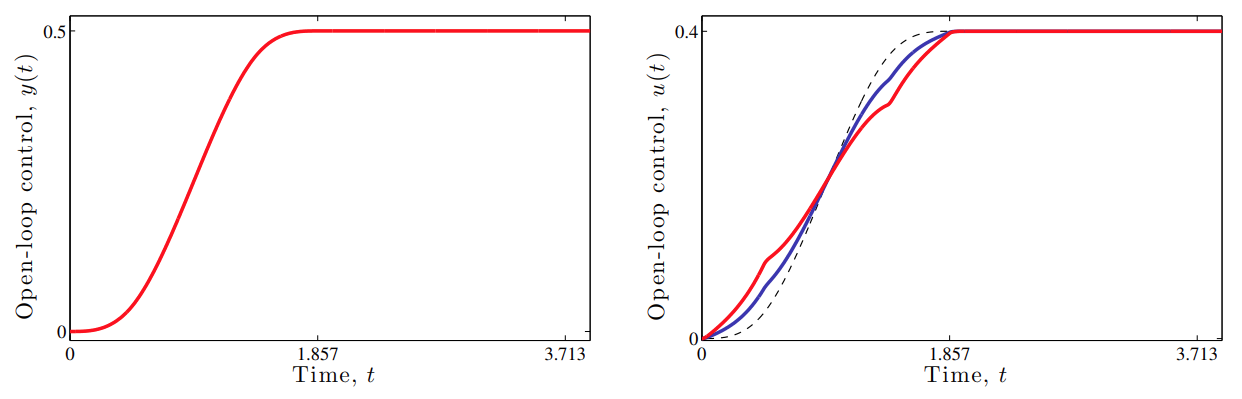
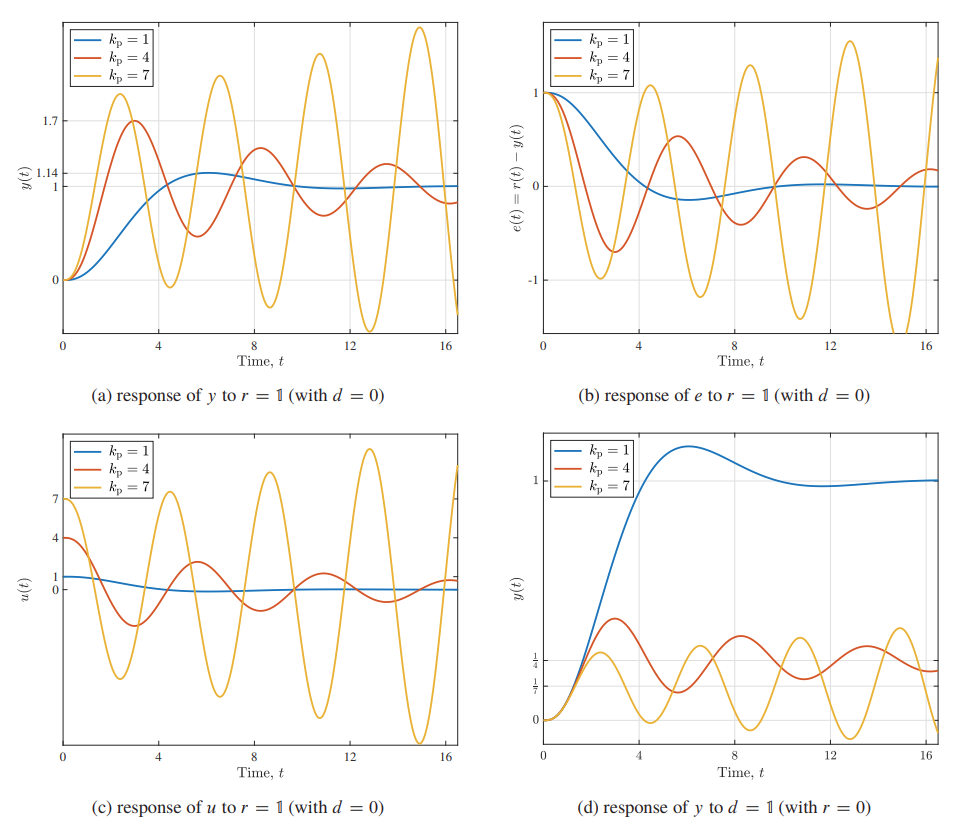
נביט בתגובות של מערכת זו עבור. בבקר בחוג סגור לעיל, הבקר לא תלוי במסה (הוא פשוט
):
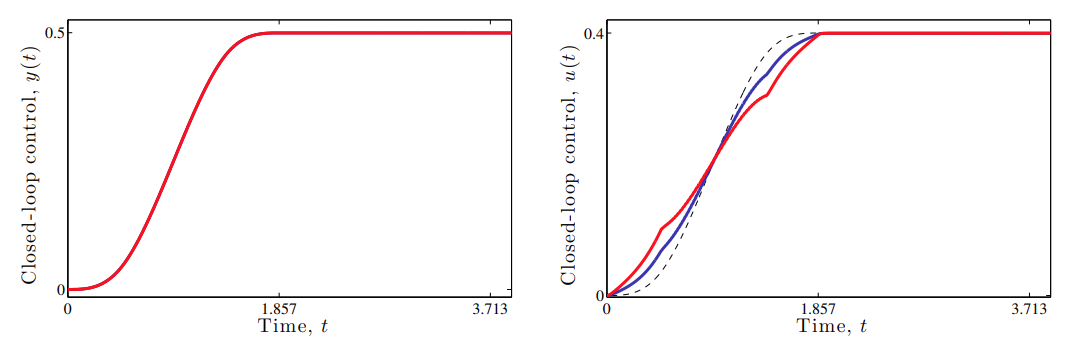
תגובה של הבקר בחוג סגור עבור
. הגרף האדום הוא עבור מסה פי יותר גדולה מהמסה של הגרף הכחול. (Leonid Mirkin’s Homepage, n.d.). לעומת זאת, בבקר בחוג פתוח, אם נרצה לבחור בבקר טוב, הוא חייב להיות תלוי ב-
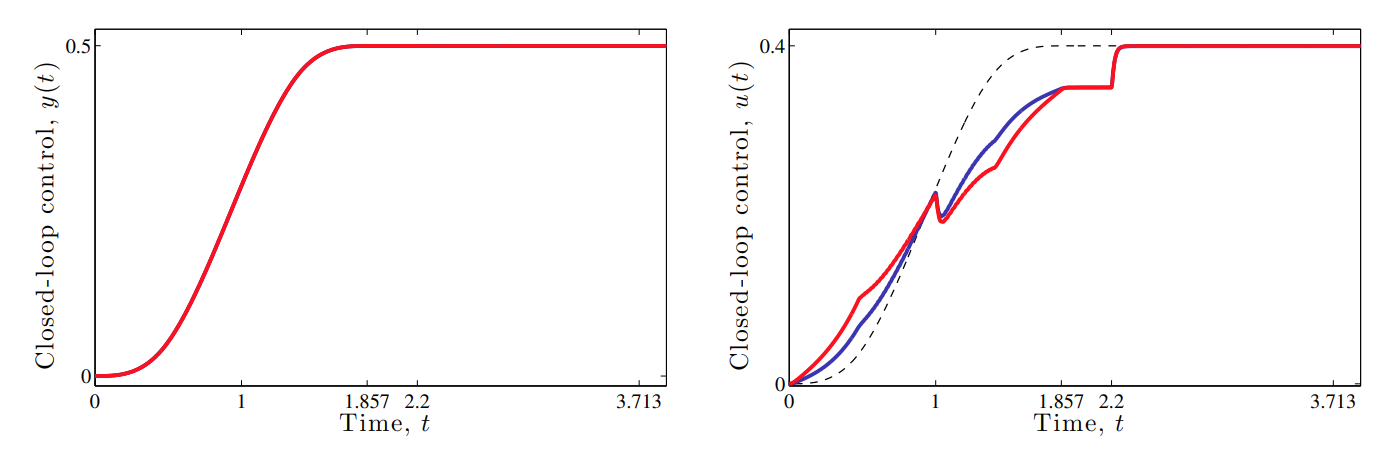
:
תגובה של בקר בחוג פתוח עבור
. (Leonid Mirkin’s Homepage, n.d.). בבקר בחוג סגור, הבקר רגיש ל-
דרך :
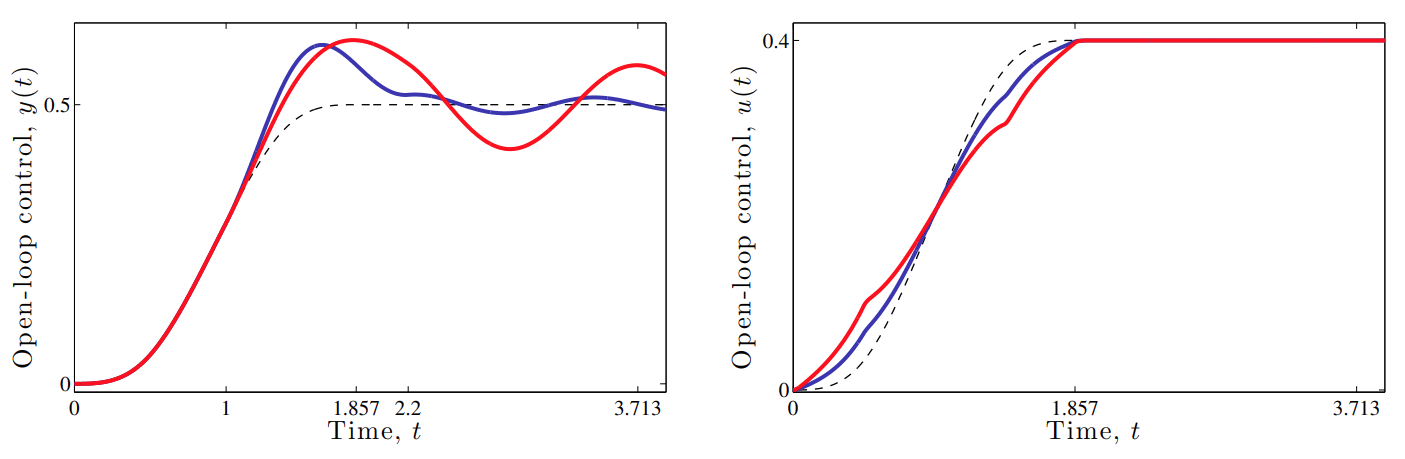
תגובה של הבקר בחוג סגור עבור
. (Leonid Mirkin’s Homepage, n.d.). לעומת זאת, בבקר בחוג פתוח, הבקר “לא מודע” בכלל ל-
:
תגובה של בקר בחוג פתוח עבור
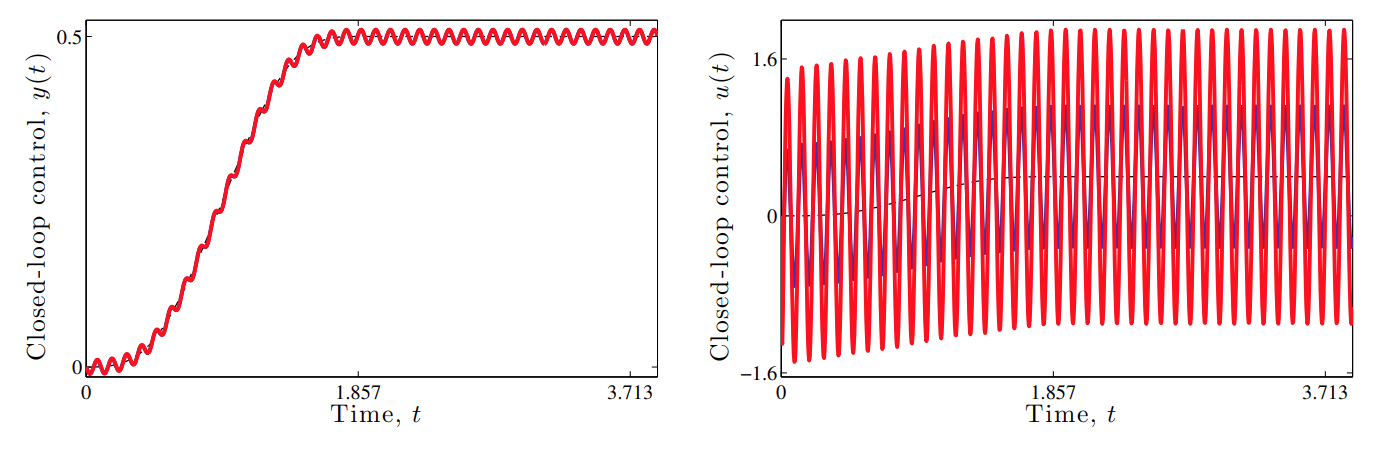
. (Leonid Mirkin’s Homepage, n.d.). בבקר בחוג סגור, הבקר רגיש ל-
:
תגובה של הבקר בחוג סגור עבור
. (Leonid Mirkin’s Homepage, n.d.). לעומת זאת, הבקר בחוג פתוח לא מושפע בכלל מ-
:
תגובה של בקר בחוג פתוח עבור
. (Leonid Mirkin’s Homepage, n.d.).
יציבות פנימית
בעוד בקרה בחוג סגור יכולה לעשות מה שבקר בחוג פתוח לא יכול אף לעשות;
- לעבוד גם אם יש שגיאות במידול
. - לעבוד גם במקרה של הפרעות.
לבקר בחוג סגור יש בעיה אחרת: הוא דורש יציבות מכל תהליך בין שני אותות כדי לתפקד טוב.
הגדרה: יציבות פנימית
נאמר שהמערכת בחוג סגור
היא יציבה פנימית אם הפונקציות תמסורת מכל הכניסות האפשריות לכל היציאות האפשריות הן יציבות.
עבור המערכת לעיל, ישנם ארבעה פונקציות תמסורת כאלו - כנופיית הארבעה:
לכן, נצטרך לבדוק רק את ארבעתם (תאכלס, רק שלושה, כי
כדי לנסות לפשט את הקריטריון ליציבות פנימית, נבחן יותר את הקשרים בין פונקציות תמסורת אלו. נסמן:
נניח ש-
כאשר:
והוא נקרא הפולינום האופייני של המערכת.
לפונקציות תמסורת אלו יש את אותו המכנה,
- אם אין צמצומים, אז לכל הפונקציות תמסורת אותם הקטבים ונוכל לומר שהמערכת יציבה אם
הוא Hurwitz. - אם יש צמצומים, אז יש איזשהו שטאנץ (שניר יא אשכנזי) שמוסבר סבבה יחסית במצגות, והוא מוביל למשפט הבא:
משפט:
אם
ו- הם proper וגם , אז המערכת יציבה פנימית אמ”ם:
- אין צמצומים לא יציבים בין
ו- . - אחת מהמערכות בחוג סגור יציבה.
במובנים של פולינום אופייני:
משפט:
אם
ו- הם proper ו- , אז המערכת היא יציבה פנימית אמ”ם לפולינום האופייני אין שורשים במישור הימני הסגור (RHP).
תרגילים
תרגיל 1
תהליך עם הפונקציית תמסורת:
מבוקר ע”י משוב יחידה עם בקרים סטטיים (פרופורציונליים) מהצורה
סעיף א’
מצאו את ארבעת הפונקציות תמסורת של מערכת זו. מהו הפולינום האופייני? תחת אלו הגברים המערכת במחוג סגור היא יציבה פנימית?
פתרון:
מהגדרת
נחשב כל אחד מארבעת פונקציות התמסורת:
כדי לבדוק את היציבות אנו צריכים להביט במכנה. נזכור מטבלת רות שיש דרך מהירה לבדוק Hurwitz עבור פולינום ממעלה שלישית, ונסיק כי כדי שהמכנה יהיה Hurwitz, צריך להתקיים:
סעיף ב’
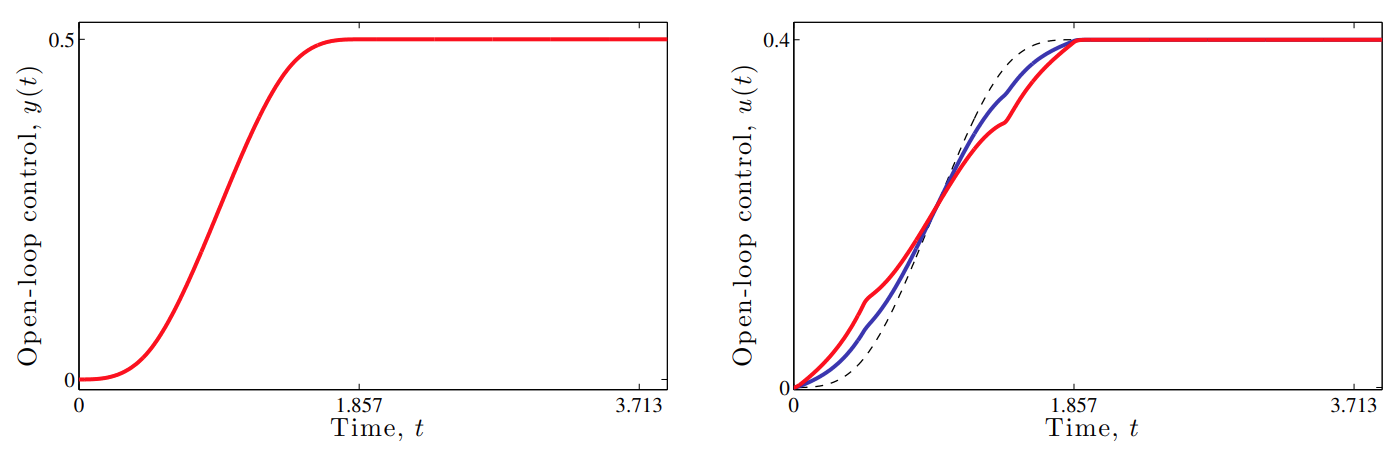
יהי
תגובות מדרגה של מערכת בחוג סגור.
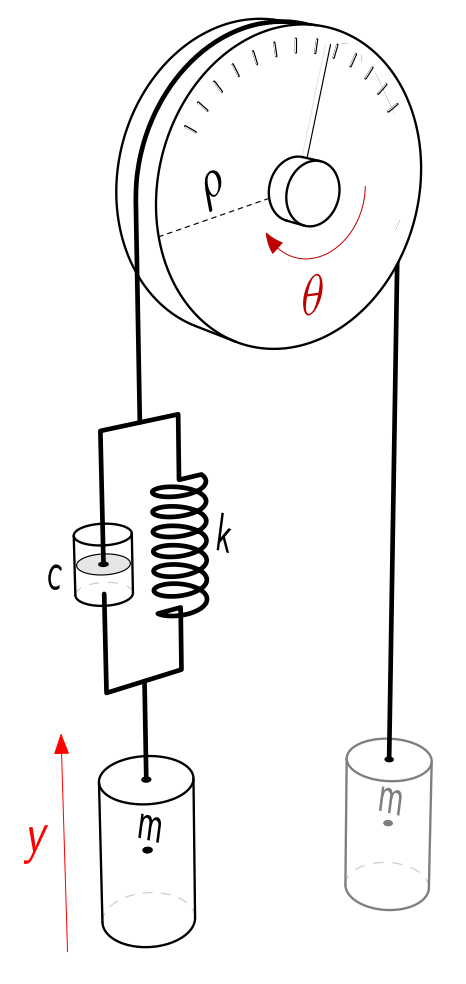
תרגיל 2
הביטו במערכת הבאה:
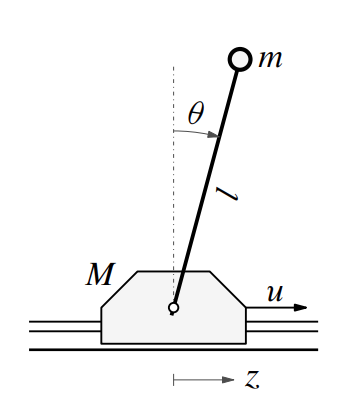
מטוטלת הפוכה על עגלה.
המטוטלת ההפוכה כוללת מסה
כאשר
סעיף א’
בצעו לינאריזציה על המערכת ואת הפונקציית תמסורת שלה עם
פתרון:
נשים לב שיש לנו 2 משתנים
לכן משוואות המצב שלנו בצורה מטריצית:
אנו רוצים להעביר הכל לצד ימין, כך שנוכל לרשום את המשוואה באופן:
נסמן:
נראה שנוכל לפתור את התרגיל גם בלי בלחשב את
לכן אנו בכלל יכולים לרשום:
נתחיל מלמצוא נקודת שיווי משקל:
נסיק כי:
עבור המצב בו המטוטלת למעלה (מה ששאלו), נבחר
נשים לב גם שאין לנו תנאי על
נמצא את היעקוביאנים, ונשים לב שזה לא כל כך פשוט:
נוכיח כעת שיש איזשהו טריק עם הגזירה של מטריצה הופכית. אנו יודעים ש:
נגזור:
נציב את זה כעת ב-
האיבר באמצע מתבטל כי הוא בדיוק
נחשב את
נציב ב-
נשים לב גם כי:
לכן המערכת לאחר לינאריזציה:
נעביר אגף:
נחשב את
נציב בחזרה במערכת:
בעזרת פיתוח לא רלוונטי, שלא נדרש למבחן, נחלץ ממשוואת מצב זו את הפונקציית תמסורת:
נביט רק בשורה הראשונה:
הביטוי בצד שמאל,
נציב נתונים ונקבל:
נסמנו כהתהליך שלנו:
סעיף ב’
המערכת נשלטת במשוב יחידה סטנדרטי. האם הוא ניתן לבקרה (כלומר, להתייצב) ע”י הבקר:
וודאו את היציבות גם ע”י הפונקציות תמסורת של
פתרון:
נשים לב שיש לנו צמצום לא יציב עם התהליך שיצא לנו בסעיף הקודם. נראה איך זה ישפיע על כנופיית הארבעה:
קיבלנו ש-