מבוא
עד עכשיו עסקנו במערכות בדידות - מערכות בהן אנו מניחים שהמסות מרוכזות בנקודות יחידות, דיסקרטיות, והן מחוברות ביניהן ע”י מוטות, קפיצים ואלמנטים אחרים קשיחים חסרי מסה. התנועה של מערכות אלו מתוארת ע”י מד”רים, עם משוואה אחת לכל מסה, ומספר המסות מגדיר את מספר דרגות החופש של המערכת.
כעת, כאשר נעבור למודל טיפה יותר מדויק של מערכות - מערכות רציפות, המשוואות המתארות את התנועה של המערכת יהיו מד”חים. כיף חיים. נצטרך לקחת בחשבון עקרונות ממוצקים, בנוסף לתנאי שפה.
משוואות התנועה של חוט תונד
כדי למדל תנועה של מוט אורכי רציף, אנו יכולים לפרק אותו למספר מסות בדידות, ולהשאיף את פירוק זה לאינסוף. עוד דרך היא לפתח מאזן תנע קווי על כל אלמנט דיפרנציאלי של החוט, כמו שעשינו בפיזיקה 2. ישנה עוד דרך המסתמכת על עיקרון המילטון.
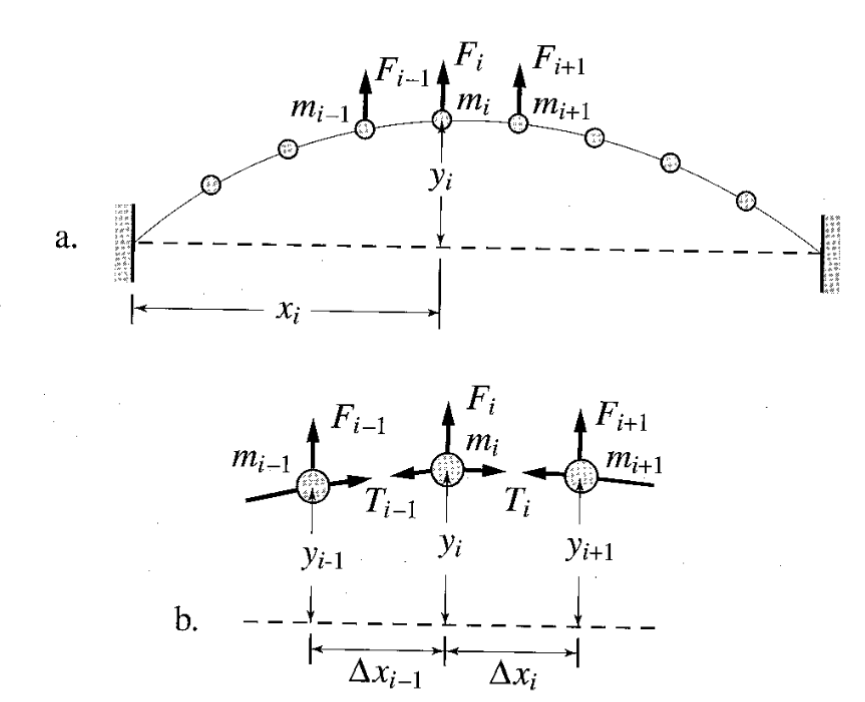
פירוק החוט למספר סופי של מסות. (a) החוט כמערכת בדידה. (b) דג”ח על המסות בחוט. (Meirovitch, 2001).
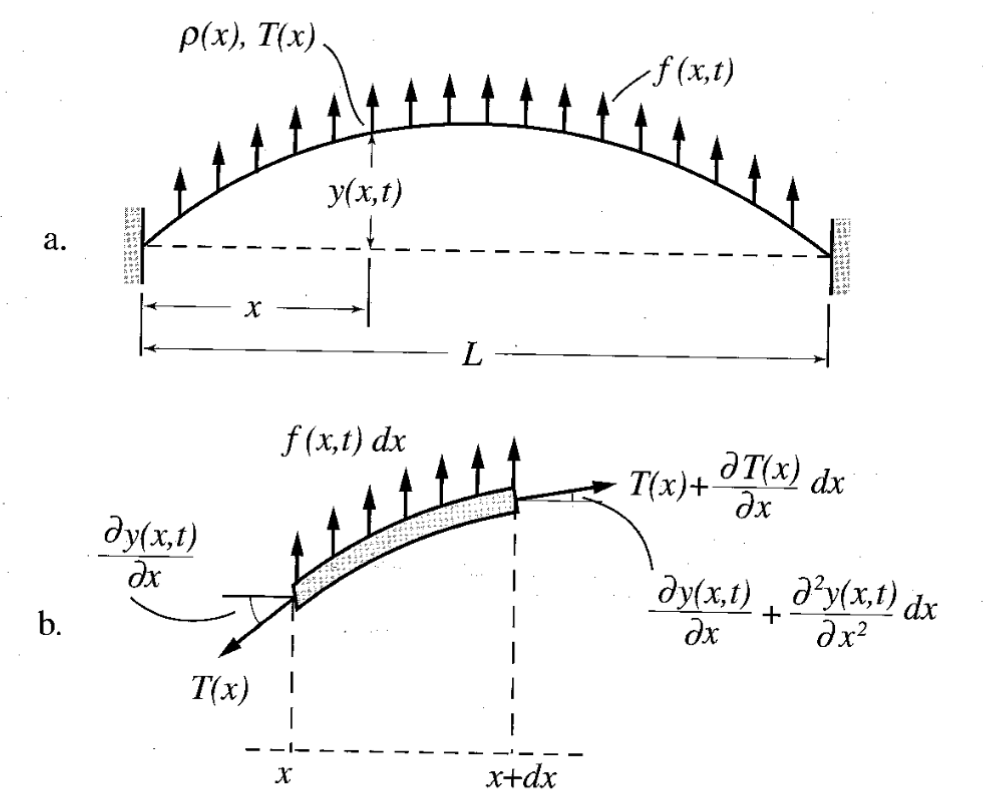
פירוק החוט לאלמנטים דיפרנציאליים. (a) החוט כמערכת רציפה. (b) דג”ח על אלמנט של חוט. (Meirovitch, 2001).
מפיתוחים אלו אנו מקבלים את משוואת התנועה:
כאשר:
היא המתיחות בחוט. היא צפיפות המסה של החוט. הוא הכוח הניצב לאורך החוט.
משוואת תנועה בסיסית זו תקיפה גם עבור בעיות שונות דומות, למשל עבור מוט במתיחה או גל בפיתול. בשביל ההמרות ניתן להיעזר בטבלה הבאה:
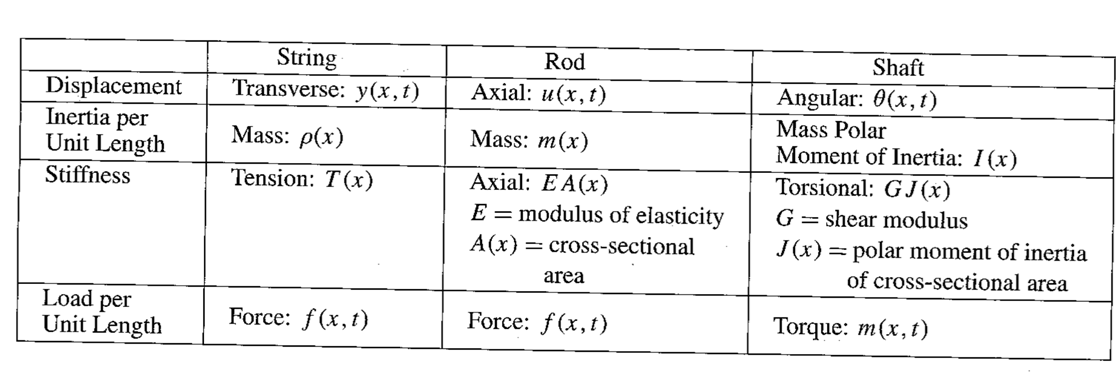
גדלים אנלוגיים. (Meirovitch, 2001).
למשל, אם מדובר במוט אלסטי:
נשים לב ש-
אם נסמן
רטט חופשי - בעיית ערכים עצמיים דיפרנציאלית
כאשר נרצה למצוא פתרונות לבעיות רטט רציפות, אנו פועלים באופן מאוד דומה לבעיות בדידות. נביט למשל במשוואת התנועה על החוט ההומוגנית:
עם תנאי ההתחלה:
בעיה זו אנו יכולים לפתור בעזרת שיטת הפרדת משתנים.
אנו נניח פתרון מהצורה:
נקבל בעיית שטורם ליוביל, נמצא אין סוף ערכים עצמיים
כאשר במקרה הזה,
נשים לב שבתצורה זו, כבר מופיעים לנו המודים הטבעיים של המערכת.
הביטויים
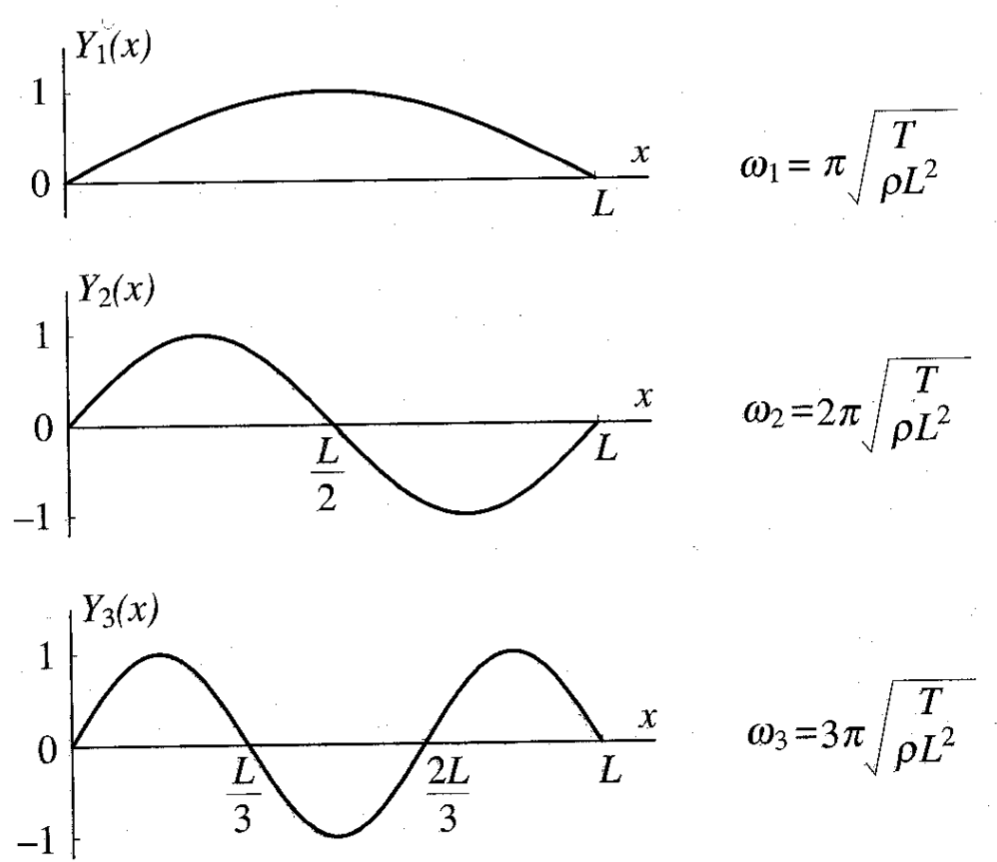
מודים טבעיים של חוט מקובע. לחוט אידיאלי ישנם אינסוף מודים טבעיים. לתדירות הכי נמוכה קוראים תדר/הרמונית בסיסית (fundamental harmonic), בעוד לתדרים היותר גבוהים קוראים אוברטונים (overtones) או הרמוניות גבוהות. (Meirovitch, 2001).
מערכות עם מסות בשפה
אם בשפה יש לנו עוד מסה בדידה, עלינו לחקור מחדש את המד”ח שהגדרנו. אנו נקבל למעשה שאחד מתנאי השפה יכלול את הערך העצמי
מוט במתיחה עם מסה בקצה. (Meirovitch, 2001).
משוואת התנועה לבעיה זו היא:
כאשר
כדי לפתח את התנאי שפה הימני, נשים לב שהכוח הצירי
בעצם במשוואה
נשווה בין
כעת עם המד”ח ושני תנאי השפה אנו יודעים לפתור בעזרת שיטת הפרדת משתנים. בהנחה ושטח החתך אחיד לאורך המוט, נוכל לרשום את הבעיה באופן הבא:
לפי הפרדת משתנים, תנאי השפה השני הוא:
לכן הבעית שטורם ליוביל היא מהצורה:
וכעת הפתרון של הבעיה דורש התעמקות נוספת, שאנו מבצעים אותם בתרגילים.
תרגילים
תרגיל 1
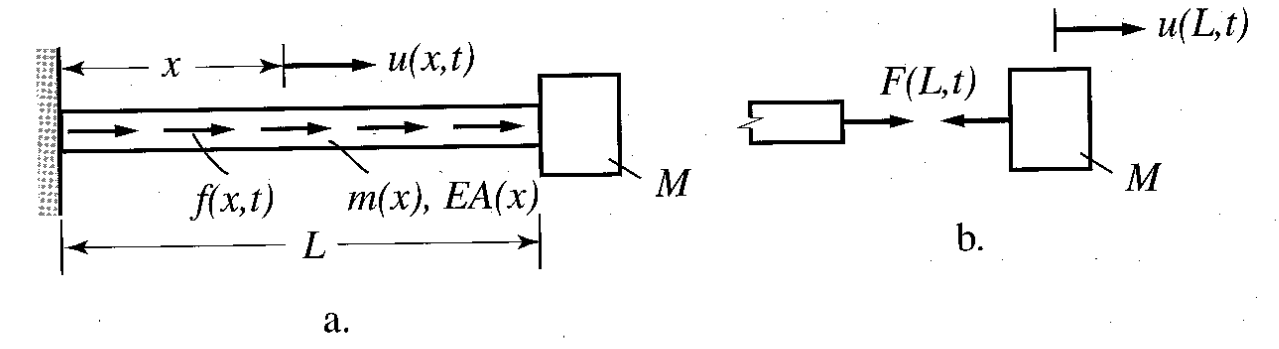
נתון מוט פיתול בעל קצה רתום וקצה נוסף המחובר לקפיץ פיתול

סכמת המערכת.
בהמשך נתייחס גם ל-מומנט מפורש
המוט בעל קוטר
הערה:
שימו לב שכאשר מסת המוט (האינרציה) הייתה זניחה, יכולנו להתייחס אליו כקפיץ פיתול רגיל (כמו במוצקים). כעת לא נוכל לעשות זאת!
לצורך הגרפים, אנו מניחים:
סעיף א’
מצאו מודים ותדרים עצמיים באופן אנליטי.
פתרון:
ראינו שמשוואת התנועה למוט פיתול תהיה מהצורה:
במקרה שלנו המוט עגול ואחיד בצפיפותו ובגאומטריה שלו, כך ש-
כדי למצוא מודים ותדרים עצמיים, נבחן את המקרה ההומוגני, ללא כוחות חיצוניים:
נוכל לסדר כדי לקבל את משוואת הגלים:
כאשר
ונקבל את בעיית השטורם ליוביל:
כאשר
לגבי התנאי שפה ב-
נציב את הפתרון שהצענו ונקבל את תנאי השפה השני:
נסכם שהבעית שטורם ליוביל היא:
הפתרון של בעיה זו יהיה מהצורה:
את
נדרוש פתרון לא טריוויאלי. כלומר, נדרוש שהדטרמיננטה של המטריצה לעיל תתאפס. נקבל את המשוואה:
זוהי משוואה סתומה. ניתן לפתור אותה נומרית. מבחינת הצגה גרפית, נקבל:
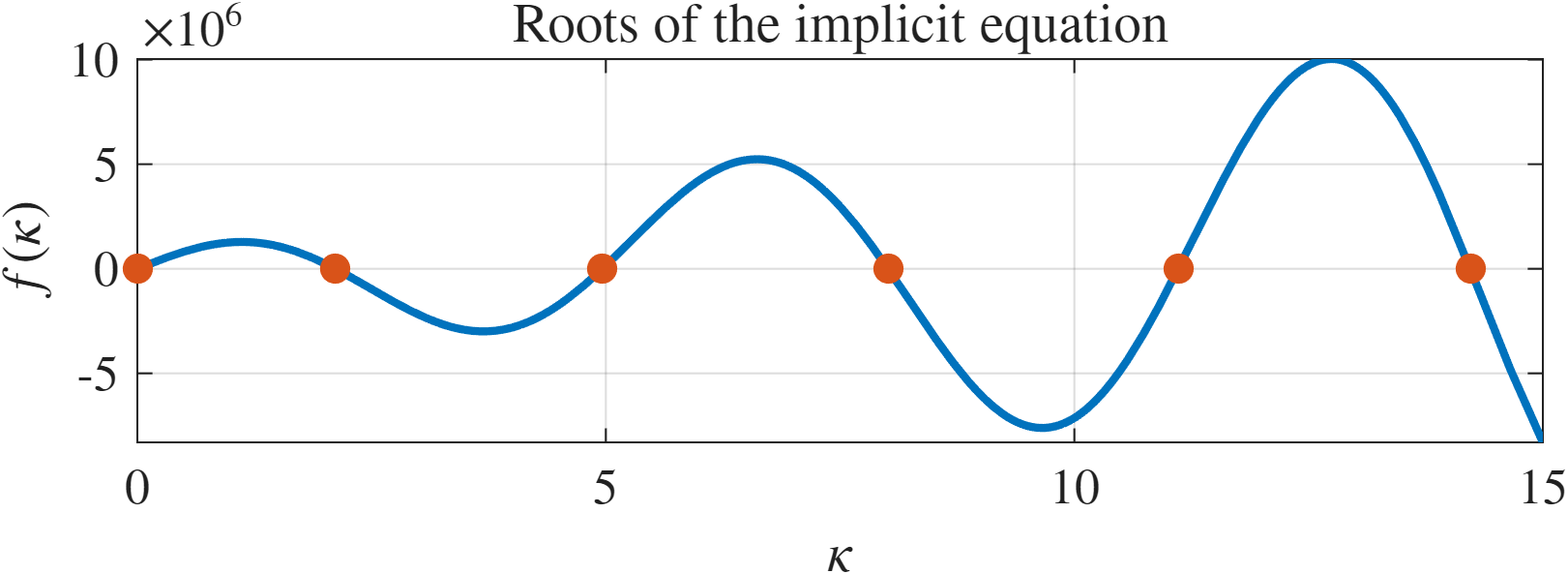
הצגה גרפית של הפונקציה הסתומה וחיתוכה עם ציר ה-
- הפתרונות שלה.
נוכל כעת למצוא את התדרים הטבעיים ע”י הצבה ב-
למעשה קיבלנו ש-
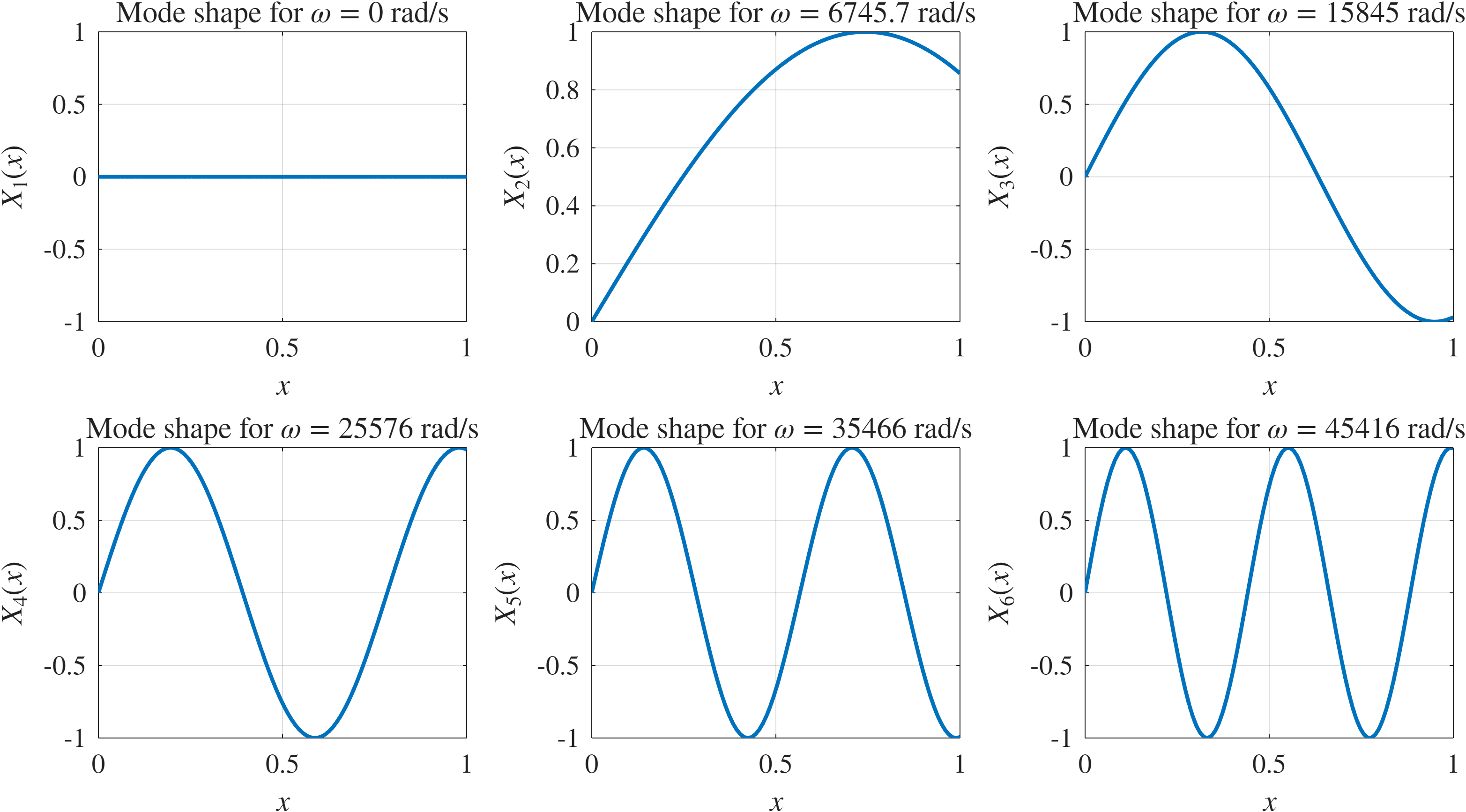
הפונקציות העצמיות/המודים של המערכת הנ”ל.
סעיף ב’
כעת נניח שפועל מומנט מפורס
פתרון:
קיבלנו קודם שהמודים הם
כאשר
נדרוש שהקבועים
לכן לכל מוד נקבל בהתאמה:
כאשר
סעיף ג’
מצאו את משוואת התנועה בקואורדינטות מודליות בנוכחות מומנט מפורש כללי
פתרון:
משוואת הגלים למוט פיתול בהינתן מומנט מפורס היא:
אנו יודעים שניתן לרשום את הקואורדינטות הפיזיקליות
נציב במד”ח ונקבל:
נכפיל מצד שמאל ב-
מפני שהמודים מנורמלי מסה ובגלל תכונת הבי-אורתוגונליות נקבל כי האינטגרלים שונים מאפס כאשר
כך שמשוואות התנועה המודליות:
כאשר:
כמו במערכות בדידות,
TODO: להשלים