מבוא
דינמיקה היא ענף של פיזיקה שעוסק בתנועה של גופים תחת עומסים. בקורס זה נעסוק בבעיות שתורת היחסות זניחה, כך שנוכל לפתור אותם ע”י מכניקה ניוטונית.
ניתן לחשוב על רטט או תנודות כתת-קבוצה של דינמיקה בה המערכת נתונה תחת עומסים הגורמים למערכת לנוע הלוך ושוב סביב נקודת שיווי משקל.
תאכלס, מערכות אמיתיות הן מאוד מסובכות כך שמאוד קשה לחזות את תגובתן לתנאים מסוימים. אבל, היכולת לחזות התנהגות מערכת היא חיונית. במקרים אלו, אנו בונים מערכת מפושטת של המערכת האמיתית - מודל.
הרבה מערכות ניתנות לסימולציה ע”י מודלים שהתנהגותם מתוארות ע”י מד”ר מסדר ראשון. אלו הן מערכות עם דרגת חופש יחידה. זהו המקרה כאשר המודל הוא למשל מסה שנעה רק בציר אחד, או מסתובבת רק סביב ציר אחד. מודלים אחרים בדרך כלל בנויים ממספר מסות המחוברות אלסטית (קפיץ) אחת לשנייה. מודלים כאלו מתוארים ע”י מערכת מד”ר, והן מערכות רבות דרגות חופש.
נתחיל מהצגת המכניקה הלגראנג’ית, שבעזרתה נוכל לבנות מערכת מד”ר לתיאור של מערכות רבות דרגות חופש.
מכניקה לגראנז’ית
עד כה תיארנו מערכות פיזיקליות ע”י מכניקה ניוטונית - בנינו דג”ח ורשמנו משוואות שיווי משקל (חוק שני של ניוטון). אבל, עסקנו גם בכל מיני שיטות הנקראות שיטות אנרגיה. למשל, במוצקים 1 כאשר הצגנו את רעיון העבודה הוירטואלית, או במוצקים 2 כאשר השתמשנו בשיטות אנרגיה למציאת שקיעה של קורות.
שיטות אלו במובן כזה או אחר דומות או או נכללות בדרך שונה להביט על מערכות פיזיקליות - מכניקה לגראנז’ית. זוהי שיטה שקולה למכניקה ניוטונית, אבל אחת שיותר נוחה לשימוש במקרים מסוימים.
כדי לפתור בעיה במכניקה ניוטונית, אנו משרטטים דג”ח - סכימה של המערכת וכוחות ומומנטים הפועלים על המערכת. לאחר מכן, אנו מפעילים את חוק שני של ניוטון
במכניקה לגראנז’ית אנו משרטטים על הסכימה מהירויות קוויות וזוויתיות - אנו מעוניינים בעיקר באנרגיה הפוטנציאלית והקינטית של המערכת. נתחיל מהכרת מושגים בסיסיים, ולאחר מכן נעבור לכתיבת משוואות התנועה של מערכת בעזרת מכניקה לגראנז’ית.
דרגות חופש וקואורדינטות מוכללות
כדוגמה, נתחיל משתי מסות המחוברות ע”י מוט, כפי שמתואר באיור הבא:
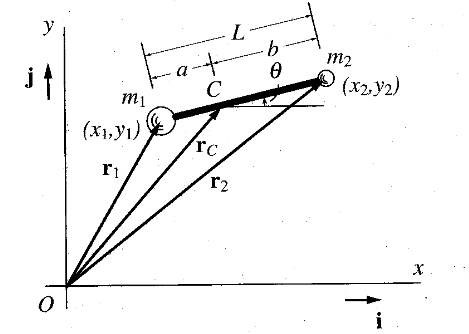
שתי מסות המחוברות במוט (dumbbell). (Meirovitch, 2001).
בהנחה והמערכת נעה במישור
שכולל ארבע קואורדינטות
המייצגת משוואה הולונומית. כיוון שמשוואה זו ניתנת עבור אחת הקואורדינטות בהינתן השלוש האחרות, נסיק שרק שלושה קואורדינטות הן בלתי תלויות. לכן, אם הבעיה מתוארת ע”י הקואורדינטות
מה ההבדל בין מערכת צירים וקואורדינטות?
מערכת צירים היא קבוצת הוקטורים שפורשת לנו את המישור/מרחב איתו אנו עובדים. בדינמיקה סימנו את הוקטורים האלו ב-
. בעזרת המערכת צירים אנו יודעים לתאר את המיקום של נקודה במישור/מרחב.
לעומת זאת, קואורדינטות הן משתנים סקלרים בעזרתם אנו יכולים לתאר מערכת מסוימת. למשל, בדוגמה לעיל, אנו יכולים לתאר את המערכת בעזרת 4 קואורדינטותשהן במקרה גם קואורדינטות שהגודל שלהם קשור למערכת צירים . באותו אופן, הקואורדינטות יכולות להיות גם זוויות, כמו למשל הזווית של המוט ביחס לציר .
ברוב הבעיות בתנודות, בחירה יותר חכמה של קואורדינטות יכולה לפשט את הקשיים שכלולים כאשר עובדים עם עודף קואורדינטות או משוואות הולונמיות. באיור, נעדיף כנראה לעבוד עם המיקום
נוכל להכליל את הבעיה למערכת של
קואורדינטות הן בלתי תלויות, כאשר
הקואורדינטות המוכללות
עבודה וירטואלית
בעזרת עיקרון העבודה הוירטואלית אנו יכולים למצוא את נקודות שיווי המשקל של מערכת מסוימת, כמו שעשינו במוצקים 1. בעיקרון זה, אנו מקבעים את האילוצים, את הזמן ולכן למעשה גם את הכוחות. מה שאנו כן משנים הוא מיקומים - נגדיר תזוזות וירטואליות עבור ה-
תזוזות כפי שנאמר חייבות לקיים את אילוצי המערכת, אבל חוץ מזה הן שרירותיות לחלוטין. למשל, אם חלקיק במערכת מאולץ לנוע על משטח מסוים, אז התזוזה הוירטואלית שלו חייבת להיות במקביל למשטח.
תזוזות אלו הן גם אינפיניטסימליות, אבל מאחר ואנחנו מקבעים את הזמן, אנו מסמנים את תזוזות אלו עם
עיקרון העבודה הוירטואלית
נניח ועל כל אחד מהחלקיקים
כאשר
עבור מערכת בשיווי משקל, כל חלקיק חייב להיות במנוחה, כך שהכוח השקול על כל חלקיק חייב להתאפס:
ולכן, העבודה הוירטואלית
כאשר נסכום לפי
כאשר נציב את הפירוק שלנו של הכוח השקול עבור כל חלקיק, נקבל:
נביט כעת במערכות בהן העבודה הוירטואלית כתוצאה מכוחות מאולצים מתאפסת. לדוגמה, חלקיק המוגבל לתנועה על משטח חלק:
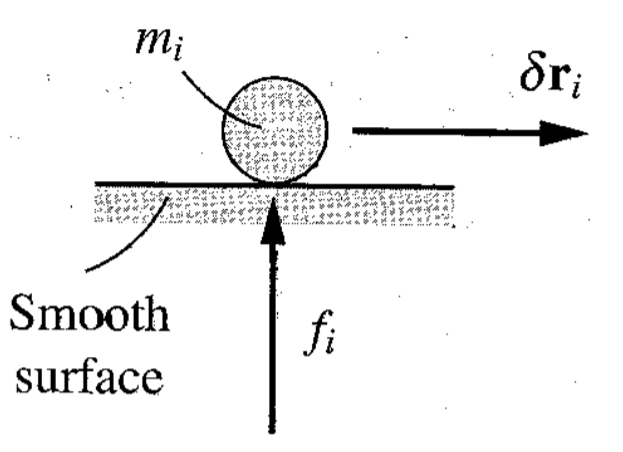
חלקיק על משטח חלק. (Meirovitch, 2001).
במקרה זה, כוח האילוץ הוא נורמלי למשטח, והעבודה הוירטואלית היא מקבילה למשטח, כך שהעבודה הוירטואלית היא אפס, כי המכפלה הסקלרית של שני וקטורים המאונכים אחד לשני היא אפס.
לעומת זאת, אם החלקיק נע על משטח מחוספס, בנוסף לכוח הנורמלי למשטח, ישנו גם כוח המקביל למשטח כתוצאה מחיכוך:
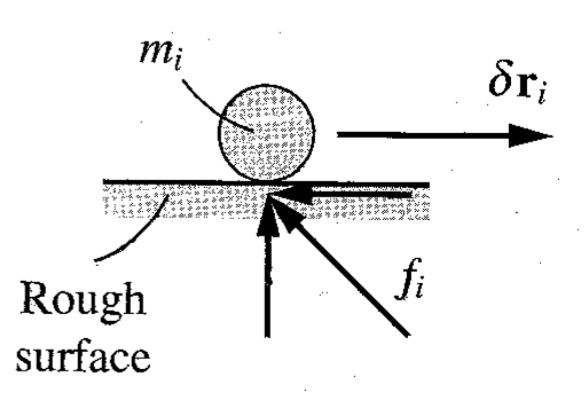
חלקיק על משטח מחוספס. (Meirovitch, 2001).
לכן, העבודה הוירטואלית המתבצעת ע”י כוח האילוץ היא לא אפס. ללא כוחות חספוס, או כל כוח אחר עבורו העבודה הוירטואלית היא אפס, אנו יכולים לקבוע ש:
בבעיות שניתקל בהן בקורס זה, אנו נחשיב את כוחות החספוס ככוחות מופעלים, כלומר ב-
כאשר נציב את הנחה זו בחזרה בסכימה של העבודות הוירטואלית, נקבל:
לעיקרון זה קוראים עיקרון העבודה הוירטואלית.
כאשר כל התזוזות הוירטואליות הן בלתי תלויות, נוכל להשתמש בעיקרון העבודה הוירטואלית כדי למצוא את התנאים לשיווי משקל במערכת. אכן, כאשר כל
כלומר, משוואות שיווי המשקל.
המצב שונה לחלוטין כאשר הקואורדינטות
לכן, כאשר “נגזור” את
כאשר אנו משתמשים בעיקרון הסכימה של איינשטיין.
ל-
כאשר:
נקראים כוחות מוכללים. המצב כעת שונה, כי כל
אנו נסיק שהמשוואה שמצאנו
תתקיים רק אם
עיקרון דלמבר
עיקרון העבודה הוירטואלית עוסק במצבי שיווי משקל של מערכות. בפני עצמו, לא ניתן לנסח איתו בעיות בתנודות, שהן למעשה בעיות בדינמיקה. אבל, ניתן להרחיב את עיקרון העבודה הוירטואלית לדינמיקה, הידוע בשם עיקרון דלמבר (d’Alembert’s principle).
מחוק שני של ניוטון, ובהנחה ושקול הכוחות הפועל על חלקיק
כאשר נוכל להתייחס לביטוי
למשוואה שרשמנו לעיל לרוב מתייחסים כעיקרון דלמבר, והיא מאפשרת לנו להתייחס לבעיות בדינמיקה כאילו הן היו בעיות בסטטיקה. אבל, אנו מעוניינים במשוואה זו לא למטרת פיתוח משוואות תנועה, אלא להרחבת עיקרון העבודה הוירטואלית למקרה הדינמי. לכן, באותו אופן שביצענו מקודם, נוכל לרשום את העבודה הוירטואלית לחלקיק
בהנחה והעבודה הוירטואלית של הכוחות אילוץ
משוואה זו כוללת גם את עיקרון העבודה הוירטואלית ועיקרון דלמבר, ונקראת עיקרון דלמבר המוכלל, או עיקרון דלמבר גרסת לגראנז’.
חשוב לציין שלא נשתמש במשוואה זו למציאת משוואות התנועה של מערכת כלשהי, אלא היא רק עוד צעד לפיתוח עוד עיקרון - עיקרון המילטון המורחב.
עיקרון המילטון המורחב
עיקרון המילטון המורחב הוא אחד מהכלים הכי משמעותיים במכניקה. ניתן לפתח אותו מעיקרון דלמבר המוכלל. נתחיל מלהכיר ש
הוא פשוט העבודה הוירטואלית של כל הכוחות המופעלים - כוחות משמרים וכוחות לא משמרים. לעומת זאת, עבור הביטוי השני בעיקרון דלמבר המוכלל, נשים לב שמתקיים:
כאשר
נבצע אינטגרציה על שני הצדדים לפי זמן, בין
אבל, התזוזות הוירטואליות הן שרירותיות לחלוטין, כך שמותר לנו לבחור אותם באופן
כאשר נסכום לפי
כאשר
כעת, נוכל לבצע אינטגרציה מ-
המתארת מתמטית את עיקרון המילטון המורחב.
מטעמי נוחות, נהוג לפרט את העבודה הוירטואלית לעבודה כתוצאה מכוחות משמרים וכוחות לא משמרים:
כאשר
עבור מערכות משמרות, מתקיים
כאשר
דוגמה:
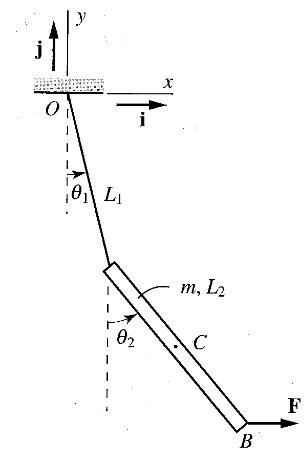
פתחו את הביטויים לאנרגיה הקינטית, הפוטנציאלית, והעבודה של הכוחות הלא משמרים של המערכת הבאה:
נשתמש בקואורדינטות המוכללות. לפי אנרגיה קינטית של גק”ש מישורי: במקרה שלנו, במערכת צירים
הצמודה למוט (ולא לחוט), אנו יכולים לרשום את מיקום מרכז המסה באופן הבא: ולכן לפי כלל האופרטור:
אנו גם יודעים שהמהירות הזוויתית של המוט היא פשוט
, וגם שעבור מוט מומנט האינרציה סביב מרכזו הוא נציב הכל באנרגיה הקינטית: עבור האנרגיה הפוטנציאלית, כאשר נבחר ב-
כנקודת ייחוס: מאחר ו-
הוא הכוח הלא משמר היחיד במערכת, העבודה הוירטואלית המתאימה לו היא: נישאר עם:
כאשר:
מתארים את הכוחות המוכללים הלא משמרים.
משוואות לגראנז’
מעקרון המילטון המורחב, בעזרת פיתוחים נוספים שכבר נמאס לי להעתיק מהספר, אנו מגיעים ל:
משפט: משוואות לגראנז'
עבור מערכת דינמית עם
דרגות חופש, עבור כל דרגת חופש מתקיים: כאשר:
- הביטוי
הוא הלגראנז’יאן . - הביטויים
הם הקואורדינטות המוכללות של המערכת. - הביטויים
הם הכוחות המוכללים הלא משמרים: ו- הוא מספר החלקיקים במערכת.
במקרה הפרטי (שהוא נכון עבור רוב הבעיות שניתקל בהם), אם מתקיים ש-
דוגמה:
פתחו את משוואות התנועה של המערכת הבאה בעזרת משוואות לגראנז’:
נשתמש בקואורדינטות המוכללות, כך שמשוואות לגראנז’ במקרה שלנו הן מהצורה: כאשר
הם הכוחות המוכללים הלא משמרים. ראינו מהדוגמה הקודמת שהאנרגיה הקינטית היא: האנרגיה הפוטנציאלית:
העבודה הוירטואלית של הכוחות הלא משמרים:
הנגזרות של האנרגיות לפי המהירויות הזוויתיות הן:
והנגזרת שלהן לפי הזמן:
בנוסף, הנגזרות לפי הזוויות:
כמו כן, הכוחות המוכללים הלא משמרים הם למעשה המקדמים של
ו- בעבודה הוירטואלית, כלומר: נציב את כל הביטויים שמצאנו במשוואות לגראנז’ לקבלת משוואות התנועה:
תרגילים
נתחיל ממציאת משוואות תנועה במכניקה ניוטונית, ולאחר מכן נעבור למכניקה לגראנז’ית.
תרגיל 1
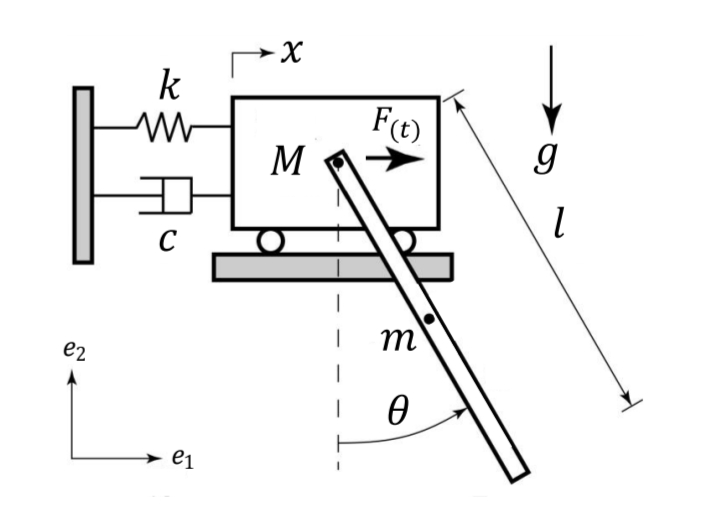
סכמת הבעיה
יש להרכיב את משוואת התנועה של המערכת באמצעות מכניקה ניוטונית.
פתרון:
נתחיל מהעגלה, שנסמן את מיקומה ב-
נמצא את הכוחות:
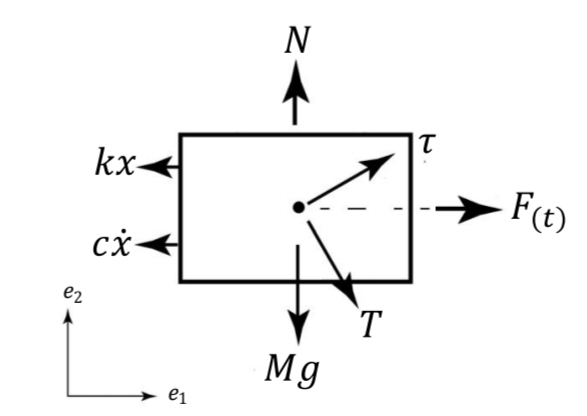
דג”ח על העגלה
למה יש
? כאשר בונים דג”ח אנחנו תמיד תמיד מציירים את כל הכוחות שעלולים להתפתח בגבולות של הדג”ח. במקרה שלנו יש ציר, בו יכולות להיות ריאקציה בכל כיוון במישור. כדי לתאר את ריאקציה זו, אנו משתמשים בשני גדלים בכיוונים ניצבים,
ו- .
אנו אמנם מכירים ממוצקים 1 שהמוט המתואר כאן הוא למעשה TFM, כך שאנו עשויים לחשוב שהוא יודע להפעיל רק כוח ריאקציה בחזרה על העגלה בכיוון המוט, כלומר רק. אבל, ניזכר שאנו לא במוצקים 1, אלא בדינמיקה - שקול הכוחות לא בהכרח אפס! לכן, האינטואיציה שלנו לגבי TFM כבר לא נכונה כאן.
לפי מאזן תנע קווי בחלקיק:
עבור המטוטלת, נגדיר מערכת צירים
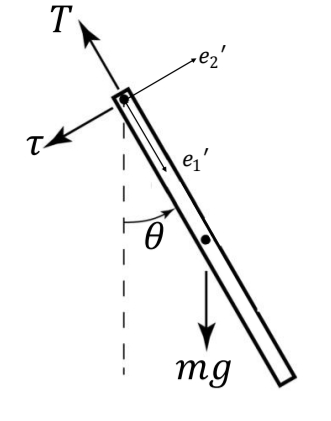
דג”ח על המטוטלת
כאשר מערכת צירים זו מסתובבת:
לכן המיקום של המטוטלת:
התאוצה שלה לפי כלל האופרטור:
לכן לפי מאזן תנע קווי:
לפי מאזן תנע זוויתי בגק”ש מישורי סביב מרכז המסה של המטוטלת בכיוון
יש לנו 4 משוואות,
עבור המטוטלת, נציב את משוואה
נסדר את המשוואה לקבלת משוואת התנועה של המטוטלת:
תרגיל 2
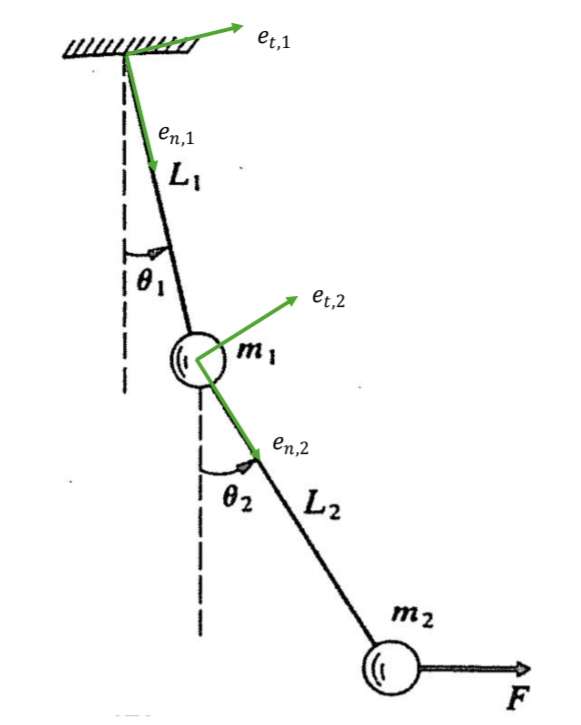
סכמת הבעיה
יש להרכיב את משוואות התנועה של המערכת באמצעות מכניקה ניטונית.
פתרון:
נגדיר מערכות צירים מקומיות (בקואורדינטות תלות מסלול):
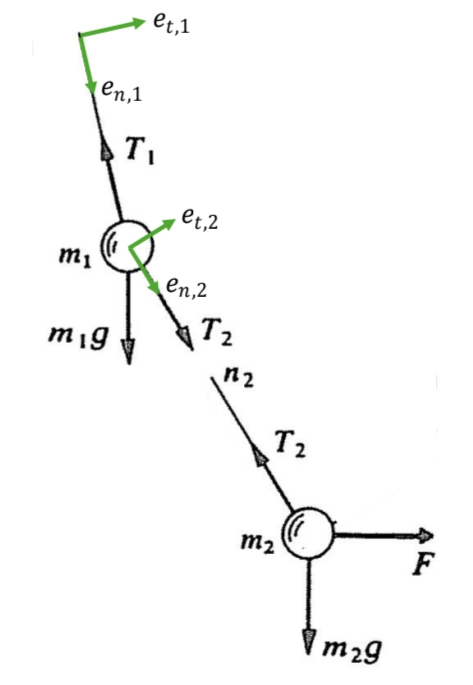
דג”ח על כל אחד מהחלקיקים
את מהירות הסיבוב של כל אחת ממערכות הצירים
המיקום של כל אחד מהחלקיקים:
לפי כלל האופרטור, נקבל כי:
נשים לב כי:
ולכן:
לנוחיות, נסמן את הפרש הזוויות
לפי מאזן תנע קווי בחלקיק, עבור כל חלקיק:
נציב את הביטויים עבור
- עבור מסה
: - עבור מסה 2:
קיבלנו 4 משוואות עבור 2 נעלמים , ביניהן שתי משוואות אי-לינאריות מסדר שני. נשים לב שמשוואת התנועה של מסה מתקבלת ישירות במשוואה האחרונה. נסדר אותה: נציב את המשוואה בכיוון של מסה במשוואה בכיוון של מסה כדי לקבל את משוואת התנועה של מסה :
תרגיל 3
סכמת הבעיה
יש להרכיב את משוואת התנועה של המערכת באמצעות מכניקה לגראנז’ית.
פתרון:
נבחר בקואורדינטות המוכללות
המיקומים של החלקיקים (העגלה והמוט), כפי שראינו בתרגיל 1:
לאחר גזירה:
לפי אנרגיה קינטית של גק”ש מישורי:
ולכן סך האנרגיה הקינטית של המערכת:
האנרגיה הפוטנציאלית של המערכת כסכום של האנרגיה הכבידתית (ביחס ל-
נישאר עם:
מבחינת הכוחות המוכללים הלא משמרים הפועלים במערכת, יש רק את
נגזור את
לכן משוואת התנועה הראשונה:
עבור
כך שמשוואת התנועה השנייה: