מצאתם טעות? תפתחו discussion! (צריך לפתוח משתמש, די באסה).
NUM1_006 מערכת משוואות לא לינארית
שיטת ניוטון למערכת משוואות לא לינאריות
נביט במערכת של משוואות לא לינאריות ב- נעלמים:
כאשר:
בכתיב אינקדסי:
זוהי הכללה של המקרה:
דוגמה:
יהיו ו- שתי פונקציות המקיימות:
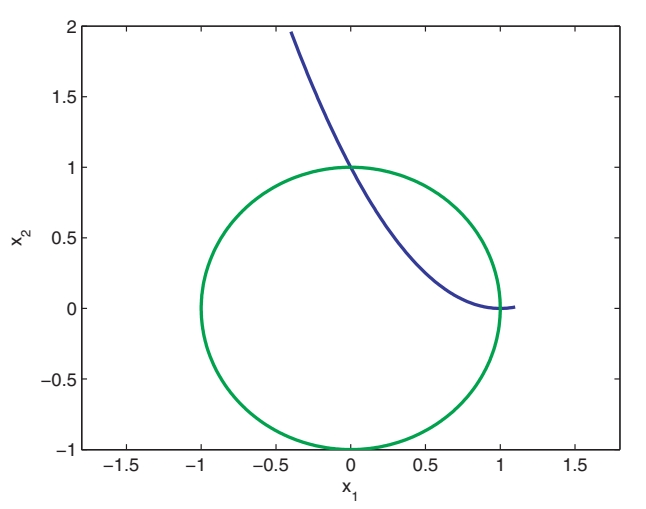
המשוואה מתארת פרבולה, והמשוואה מתארת עיגול:
ישנם שורשים למערכת המשוואות:
שורשים אלה הם נקודות החיתוך ו-
נניח של- יש נגזרות לפחות עד סדר שני. כמו במשוואות לא לינאריות במשתנה יחיד, למערכת משוואות לא לינאריות לרוב יש מספר פתרונות. בנוסף, כמו מקודם, נחפש שיטה איטריבית לפתרון משוואות לא לינאריות.
נתחיל מניחוש , כך שהשיטה תניב סדרה של איטרציות שבתקווה תתכנס לפתרון המקיים .
מערכת משוואות לא לינאריות יכולות להיות הרבה יותר מסובכות לפתרון מאשר משוואה לא לינארית אחת במשתנה אחד. בכל זאת, הרבה שיטות כמו שיטת ניוטון, ניתנות להכללה למקרה שאנו עוסקים בו.
הבעיה היא ששיטת ניוטון המוכללת תעבוד לנו עבור מאוד קרוב ל-.
טור טיילור לפונקציות וקטוריות
כדי להתחיל בהכללה לשיטת ניוטון, נצטרך הכללה לטור טיילור, כאשר נשים לב שאנחנו נעסוק במקרה בו :
ניזכר בטיילור בשני משתנים. נוכל להכליל אותו עוד יותר עבור מערכת עם משוואות ב- משתנים (פונקציה וקטורית ).
משפט:
יהי ו-, ונניח כי בעל נגזרות מסדר שני לפחות. אזי, לוקטור כיוון , הקירוב טיילור לכל פונקציה בכל רכיב היא:
נשים לב שלא רשמנו את הביטוי לשארית החלק מהנגזרת השנייה, ופשוט הסתפקנו בקיצור . כמו בשיטת ניוטון למשתנה אחד, אנחנו נתעלם מביטוי זה כי הוא מאוד מסובך, ועדיף כבר שלא נחשב אותו.
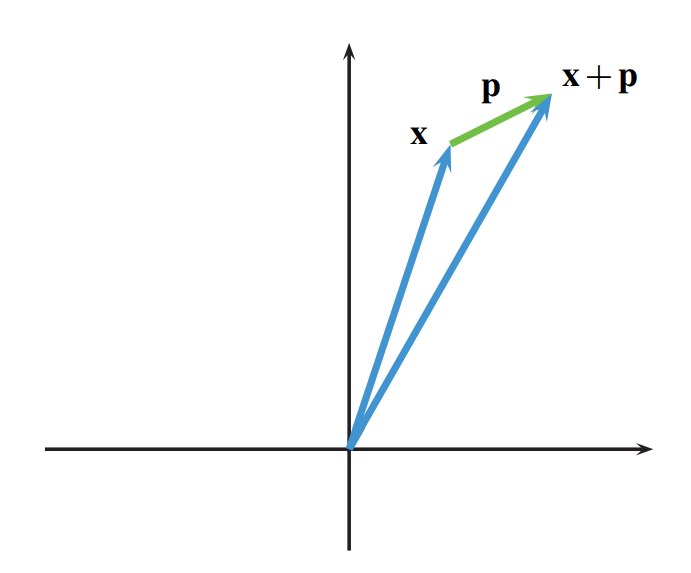
כדי לקבל טיפה יותר אינטואיציה לנוסחה שרשמנו, נצייר את ו- על גרף:
פיתוח טיילור שרשמנו נותן לנו קירוב יחסית די טוב למהו ערך בעזרת וה”נגזרת” של -שהיא היעקוביאן. במילים אחרות, אם אני נמצא על משטח משופע, כמו גבעות גורל, בנקודה , טור טיילור נותן קירוב יחסית טוב למיקום שלי אם אני אלך בכיוון , והוא כמובן צריך לעשות זאת בעזרת כל השיפועים השונים שיש מסביבי - יעני היעקוביאן.
פיתוח שיטת ניוטון
נחזור למערכת משוואות לא לינאריות:$$
\bar{f}(\bar{x})=\bar{0}