| סטודנט א’ | סטודנט ב’ | |
|---|---|---|
| שם | עידו פנג בנטוב | יובל הנדל |
| ת”ז | 322869140 | 211828587 |
| דואר אלקטרוני | ido.fang@campus.technion.ac.il | yuval.hendel@campus.technion.ac.il |
קוד MATLAB נמצא בGitHub.
חלק א’
שאלה 1
ללא הזנחת השראות, המשוואת מנוע DC:
כאשר
נחלק ב-
בהזנחת ההשראות
מתח הכא”מ החוזר הוא:
כאשר
נכפול בקבוע מנוע
הביטוי בצד שמאל הוא למעשה המומנט שהמנוע מפעיל:
במישור לפלס:
נתון כי הגלגל שיניים מגדיל את המומנט הנוצר ע”י המנוע לפי:
בנוסף, נתון כי דינמיקת העומס מתוארת ע”י:
נציב את כל המשוואות אחת בשנייה כדי לקבל את המשוואה הבאה עבור זווית זרוע המנוע. מהצבת
נציב את
במישור לפלס:
נוכל כעת לבנות את הדיאגרמת בלוקים:

דיאגרמת בלוקים של המערכת הנתונה.
שאלה 2
מהדיאגרמת בלוקים, וכללי פישוט דיאגרמות:
נישאר עם:
באותו אופן עבור
נרצה להציג את הפונקציית תמסורת בצורה הבאה:
נמצא כי:
כאשר
שאלה 3
ניתן לראות מ-
עבור
חלק ב’
נתונים:
שאלה 4
סעיף א’
עבור
לכן הקטבים בחוג הפתוח:
-
עבור
:
מאחר ויש מספר אי זוגי של שורשים מימין, ביןו- , נסיק כי יש ענף על הציר הממשי, בין ל- . בנוסף, יש עודף של שני קטבים, ולכן ישנם שתי אסימפטוטות בזוויות .
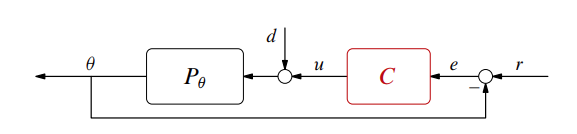
מג”ש המערכת עבור
. נסיק שהמערכת יציבה עבור כל
. -
עבור
:
מאחר ויש מספר זוגי של שורשים מימין ל-ומשמאל ל- נסיק כי יש ענף על הציר הממשי מימין ל- ומשמאל ל- . בנוסף, יש עודף של שני קטבים, ולכן ישנם שתי אסימפטוטות בזוויות .
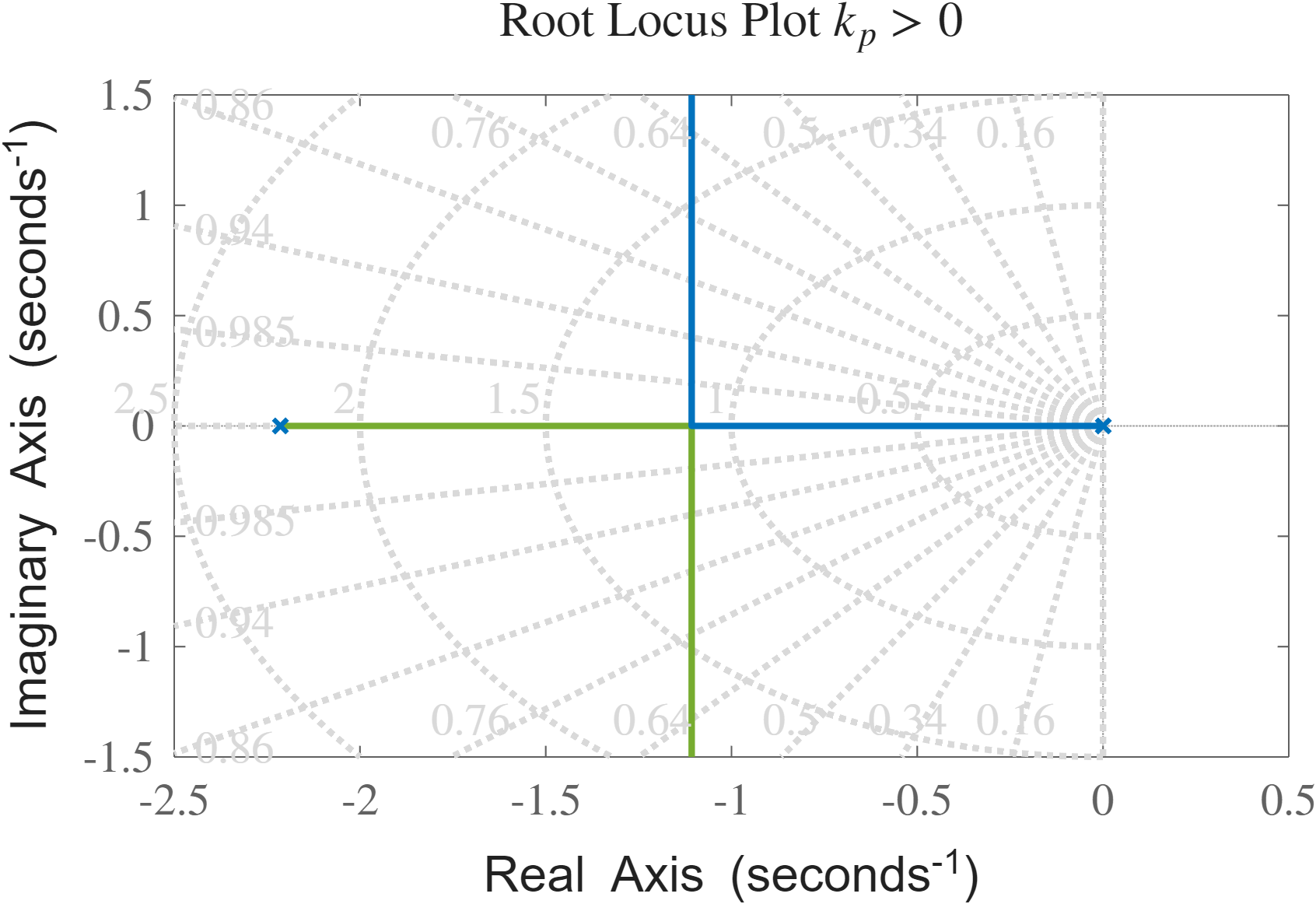
מג”ש המערכת עבור
. נסיק שהמערכת לא יציבה עבור כל
.
סעיף ב’
ראינו בהרצאה שהשגיאה
במקרה שלנו:
בהינתן ו-
נסיק ש-
סעיף ג’
מערכת כללית מסדר שני היא מהצורה:
שלושת פונקציות התמסורת של החוג הסגור הן:
לכולם אותו המכנה, שהוא הפולינום האופייני:
לכן, כאשר נרצה להתאים את המערכות שלנו לצורה
ולכן מקדם הריסון:
נבודד את
נציב נתונים ונקבל שערכי
לגבי
ולכן נקבל שבטווח
סעיף ד’
ממשוואה
נבודד את
ולכן נקבל
סעיף ה’
לפי שגיאה עבור הפרעת מדרגה, השגיאה במצב מתמיד היא:
כאשר
לגבי הטווח
ולכן טווח ה-
כך שה-
שאלה 5
סעיף א’
עבור הבקר
יש לנו אפס אחד ב-
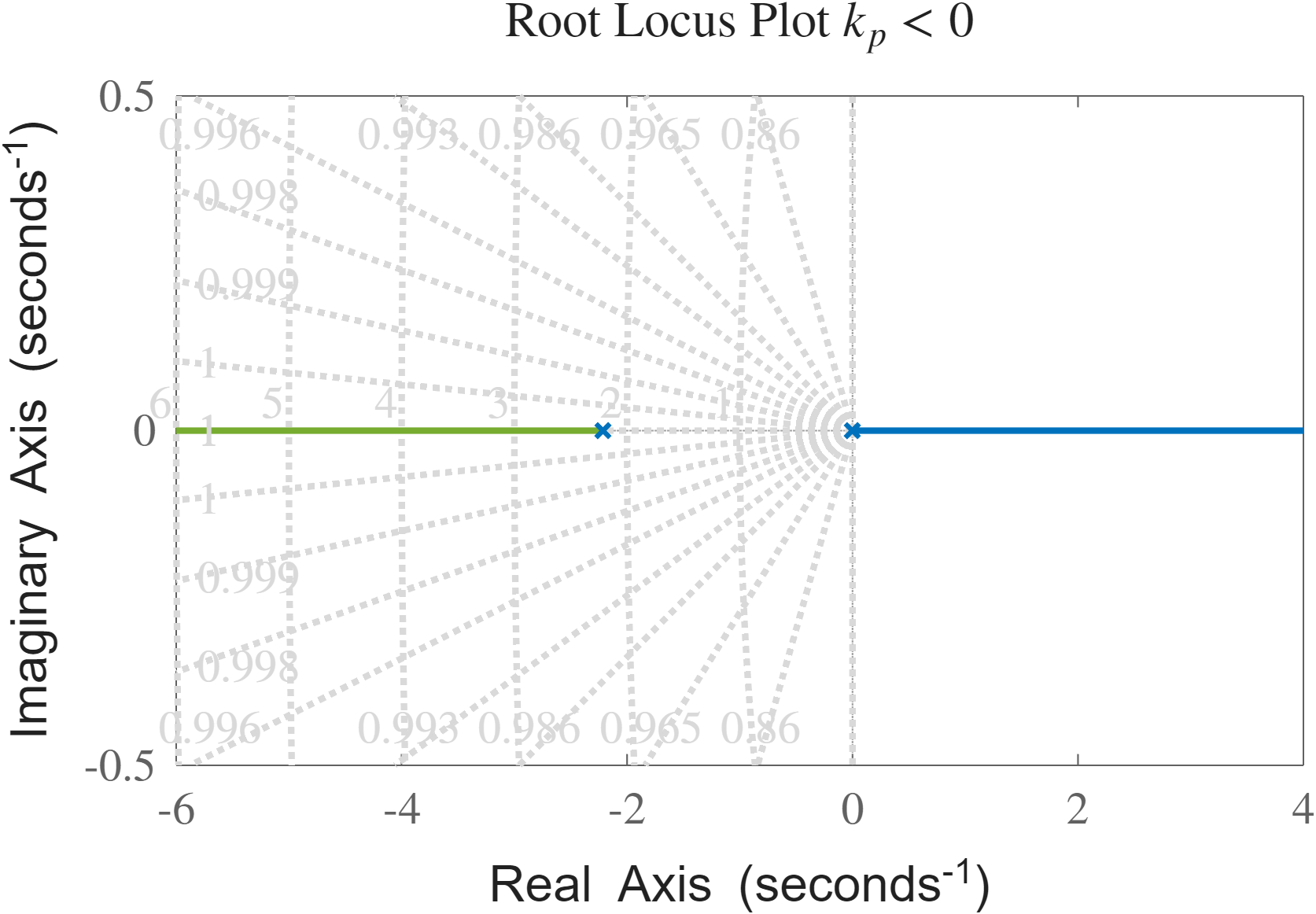
דיאגרמת מג”ש עבור ערכי
ו- שונים. לא נתייחס למקרה של כי ניתן לראות שהמערכת לא תהיה יציבה אם יהיה אפס ב-RHP. במקרה של , נקבל בדיוק את אותו הבקר משאלה 4.
קיבלנו שהמערכת תהיה יציבה רק אם:
סעיף ב’
כפי [[#שאלה 4#סעיף ב’|שאלה 4 סעיף ב’]], ראינו שנקבל
שזה נכון עבור המקרה שלנו ש-
סעיף ג’
באותו אופן כמו [[#שאלה 4#סעיף ה’|שאלה 4 סעיף ה’]], נדרוש ש-
המכנה שואף לאינסוף, ולכן התנאי לעיל מתקיים עבור כל
סעיף ד’
עבור הרצת ערכי
Best kp: 0.37748
Best ki: 0.01
Best Overshoot: 14.7704
Best Settling Time: 2.8092
תגובת המדרגה היא:
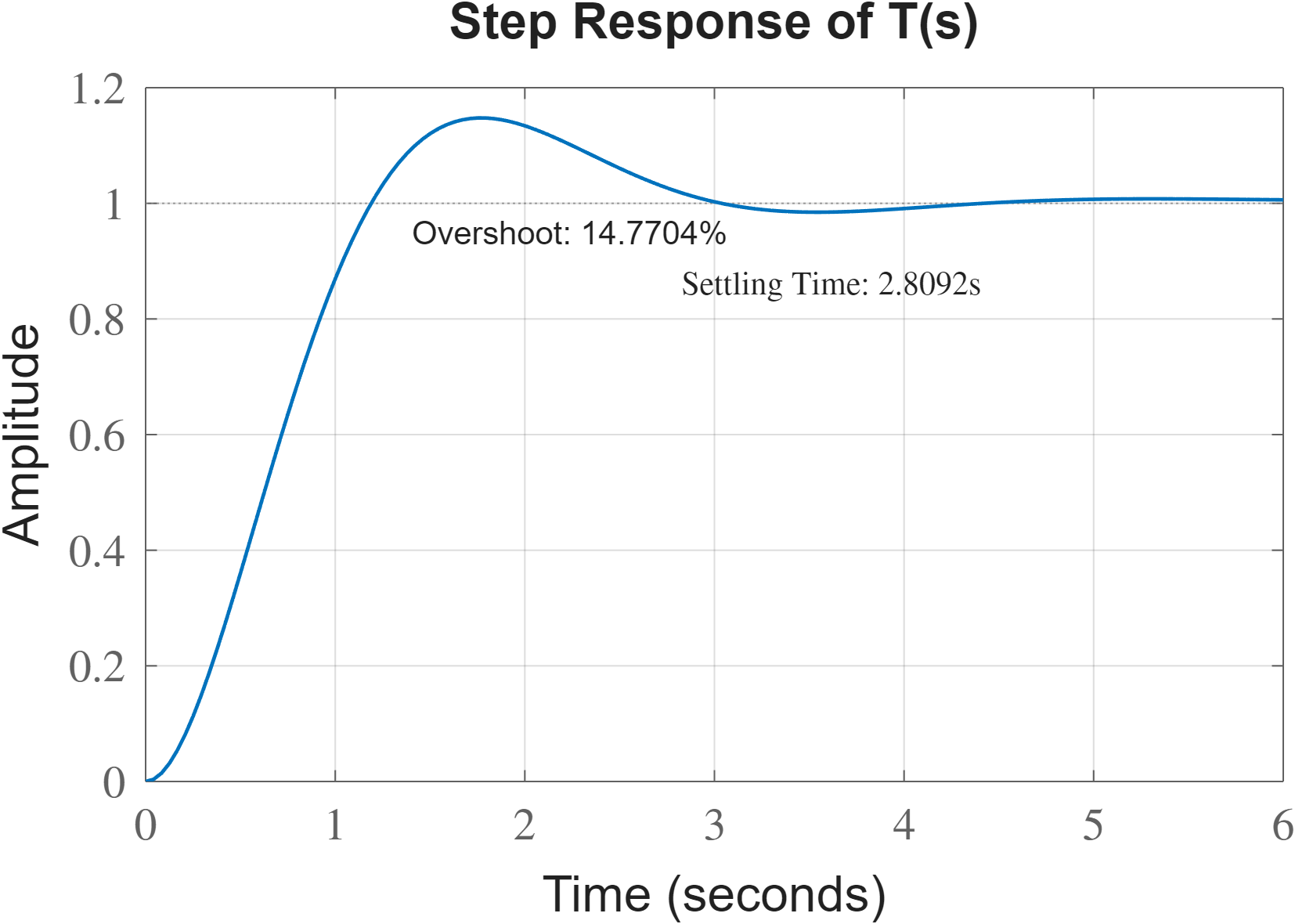
תגובת המדרגה של
.