מבוא
תחום הנדסת הבקרה מתמקד בהבנה ושליטה חלקים מהסביבה הנקראים מערכות. המערכת יכולה להיות משהו פשוט כמו מערכת בקרת שיוט ברכב, או מורכבת כמו מערכת מוח מחשב לשליטה במניפולטור.
מהנדסי בקרה עוסקים בעיצוב ויישום של מערכות בקרה בעזרת מודלים מתמטיים לינאריים, קבועים בזמן המתארים מערכות פיזיקליות אמיתיות שהן לא ליאנריות, ולא קבועות בזמן.
חיישן הוא מכשיר שמספק מדידות של אות חיצוני מסוים, למשל, מד חום התנגדותי (RTDs) הם חיישנים שבעזרתם ניתן למדוד טמפרטורה. מפעיל הוא מכשיר שמופעל ע”י המערכת בקרה כדי להשפיע על הסביבה. מנוע חשמלי שמסובב זרוע רובוטית הוא דוגמה למפעיל שממיר אנרגיה חשמלית למומנט מכני.
הנדסת מערכות בקרה מתמקדת על המידול של מגוון רחב שלמערכות פיזיקליות והשימוש במודלים אלו כדי לתכנן בקרים שיגרמו למערכות הסגורות להיות עם תכונות ביצועים מסוימות כמו יציבות, יציבות יחסית, מצב מתמיד וכו’.
מערכת בקרה היא חיבור של מרכיבים שונים שיוצרים ביחד מערכת הפולטת פלט רצוי מסוים. כל אחד מהמרכיבים נקרא תהליך (process) שניתן לתארו ע”י דיאגרמת בלוקים:
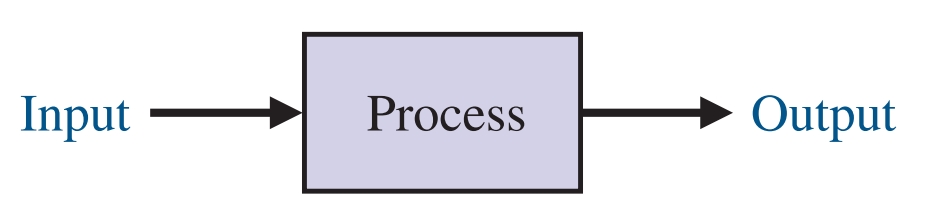
תהליך. (Dorf & Bishop, 2022).
מערכת פתוחה (open-loop control system) - מערכת ללא משוב (feedback) משתמשת בבקר ומפעיל כדי לקבל את הפלט הרצוי, כפי שמופיע בדיאגרמה:

מערכת בקרה פתוחה (ללא משוב). (Dorf & Bishop, 2022).
מערכת סגורה (feedback signal) היא מערכת שמשתמשת בפלט האמיתי של המערכת עם הפלט הרצוי. לאות החוזר מהפלט קוראים אות משוב. מערכת סגורה פשוטה עם משוב מוצגת באיור הבא:
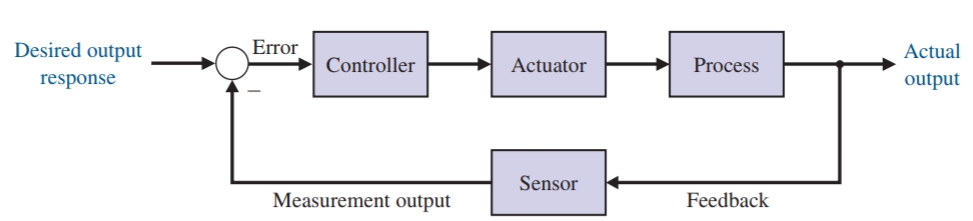
מערכת סגורה עם משוב. (Dorf & Bishop, 2022).
דוגמאות של מערכות בקרה
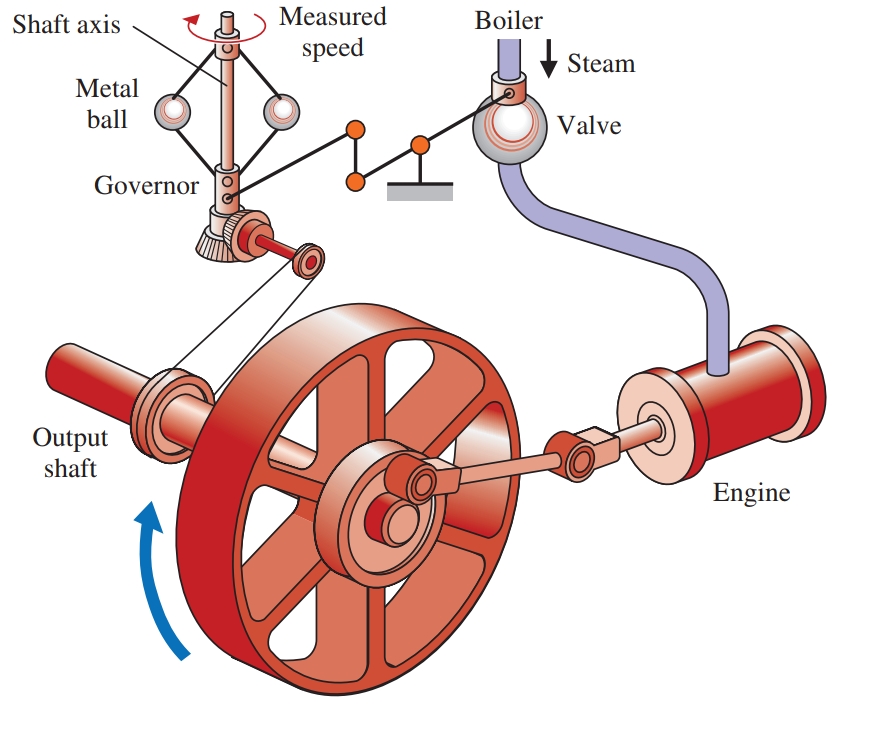
דוגמה: מנוע אדים
מנוע אדים. (Dorf & Bishop, 2022).
בעיה: לשמור על מהירות סיבוב קבועה מראש.
מפעיל: שסתום המצערת יכל לווסת את כניסת הקיטור לתוך הצילינדרים.
מכשולים: שינויים בלתי צפויים (אי ודאות) כמו:
- עומס
- לחץ אדים
- שחיקת מנוע/שסתום
הפתרון שמוצג באיור הוא בקר צנטריפוגלי - אם הוא מכוון כראוי, הבקר שומר על מהירות כמעט קבועה ללא קשר לתנאי העומס או אספקת הדלק.
באיור, הקיטור שנכנס מווסת ע”י השסתום. כאשר מהירות הסיבוב עולה, הכדורים נעים החוצה ומצמצים את פתח השסתום ואת כניסת הקיטור. כאשר מהירות הסיבוב יורדת, הכדורים נעים פנימה ובכך מגדילים את פתח השסתום וכניסת הקיטור.
דוגמה: רכבים אוטונומיים
דיאגרמת בלוקים של מערכת היגוי אוטונמית מוצגת באיור הבא:
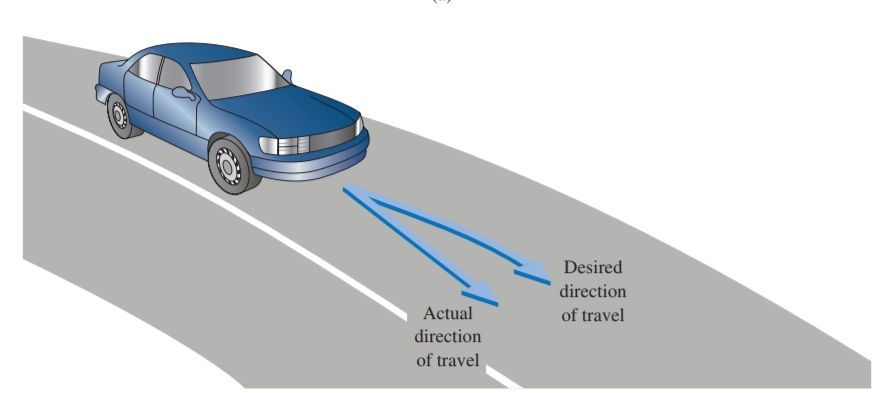
המסלול הרצוי מושווה עם מדידה של המסלול האמיתי כדי למדוד את השגיאה כפי שמוצג באיור הבא:
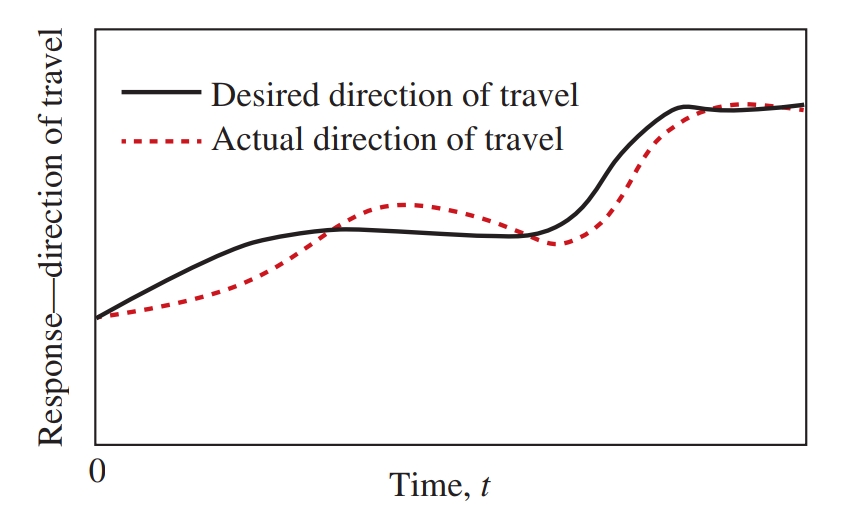
מדידה זו מושגת באמצעות משובים ויזאוליים (העין של הנהג) ומורגשים (היד שעל ההגה). ניתן להציג באופן סכמתי את התגובה לכיוון הנהיגה האמיתית ביחס לרצויה (direction-of-travel response):