| סטודנט א’ | סטודנט ב’ | |
|---|---|---|
| שם | עידו פנג בנטוב | ניר קרל |
| ת”ז | 322869140 | 322437203 |
| דואר אלקטרוני | ido.fang@campus.technion.ac.il | nir.karl@campus.technion.ac.il |
תרגיל 1
סכימת הכדור
סעיף א’
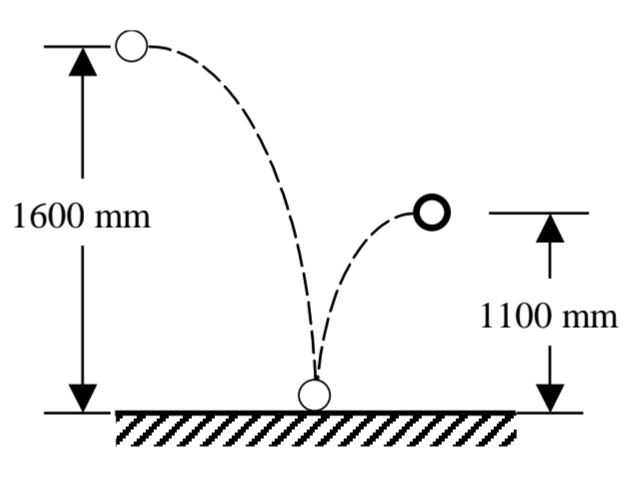
לפני ההתנגשות ואחרי ההתנגשות בקרקע ישנו שימור אנרגיה (רק כוח משמר מבצע עבודה במערכת). לכן, מרגע השחרור עד לרגע לפני ההתנגשות בקרקע:
אנו רוצים שלאחר ההתנגשות הכדור יגיע לגובה שהוא יותר מ-
לפי הגדרת מקדם התקומה של חלקיק:
מאחר ורגע לפני ורגע ההתנגשות, מהירות הכדור היא רק בכיוון האנכי, וגם הנורמל לרצפה הוא בכיוון האנכי:
נציב נתונים ונקבל:
סעיף ב’
מבחינת האנרגיה של הכדור לפני ואחרי ההתנגשות:
לכן, היחס בין אנרגיות אלו:
נציב נתונים ונקבל כי:
כלומר, הפסד האנרגיה המקסימלי של הכדור הוא
תרגיל 2
סכימת החלקיקים
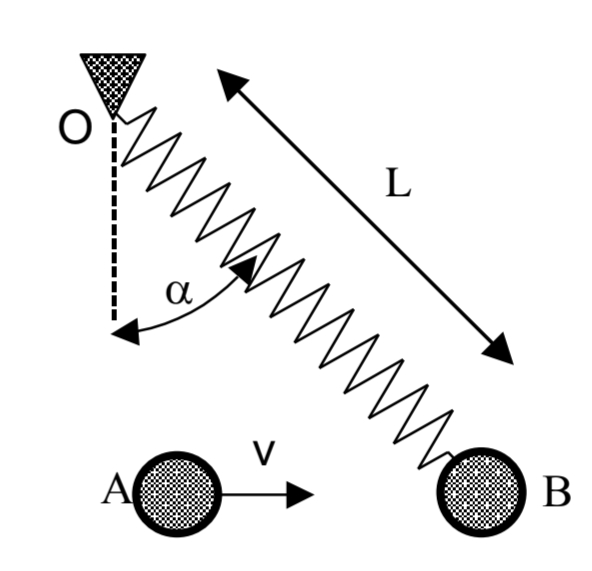
הערה:
את הרגע לפני ההתנגשות נסמן ב-
, את הרגע אחרי ההתנגשות נסמן ב- , הרגע שבו המרחק הוא מירבי ב- (כי אז ישנה רק מהירות משיקית), ואת המרחק המקסימלי של מ- ב- .
סעיף א’
נניח ולאחר ההתנגשות יש ל-
נותר לנו למצוא את
מציאת
לפי מקדם תקומה עבור מערכת חלקיקים:
במקרה שלנו,
בנוסף, עד רגע אחרי ההתנגשות, לא פועלים על מערכת החלקיקים כוחות חיצוניים בכיוון
משתי המשוואות
מציאת
בכיוון החוצה מהמסך, רגע לאחר ההתנגשות, סך המומנטים על מסה
נציב את הביטויים ל-
סעיף ב’
הביטוי שקיבלנו בסעיף קודם עבור
נציב את הנתון
תרגיל 3
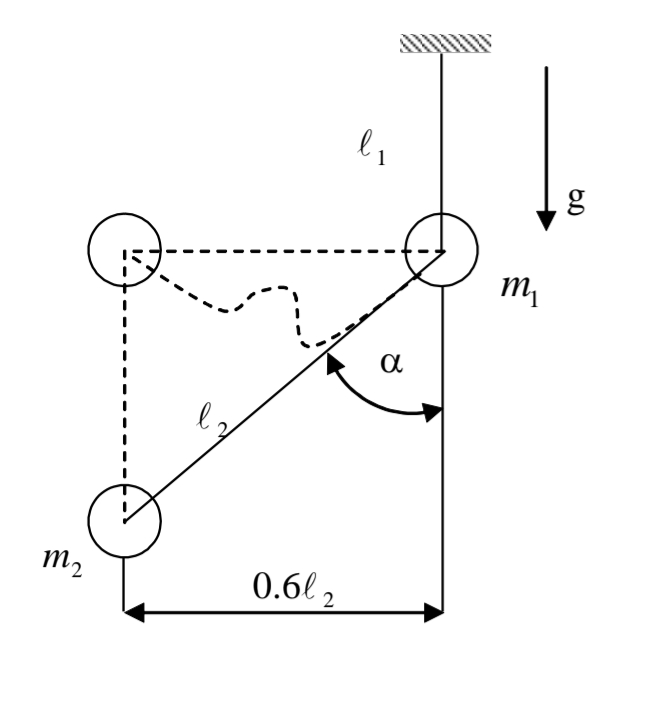
סכימת המסה
מאזן מתקף על מסה
נבצע מאזן מתקף קווי עבור מסה
נמצא את הכוחות:

דג”ח על מסה
לכן המתקף בפרק זמן ההתנגשות:
הגודל
לפי מאזן מתקף קווי:
נפרק לכיוונים:
אילוץ קינמטי על שני החלקיקים לאחר ההתנגשות:
כיוון ששני החוטים נשארים מתוחים לאחר ההתנגשות, ניתן לומר ש-
מהגדרת הזווית
נציב בתנאי שמצאנו:
מאחר ושני החוטים מתוחים גם לאחר המתקף, המהירות של מסה
\begin{gathered}
\dfrac{1}{2}m\lvert \mathbf{v}{2}^{-} \rvert^{2}+mg{h}{0}=mg({h}{0}+{\ell}{2}\cos\alpha) \[1ex]
\dfrac{1}{2}\lvert \mathbf{v}{2}^{-} \rvert^{2}=g{\ell}{2}\cos\alpha \[1ex]
v_{2}^{-}=\sqrt{ 2g{\ell}_{2}\cos\alpha }
\end{gathered}
{v}{2}^{-}=\sqrt{ 1.6g{\ell}{2}}
\mathbf{v}{2}^{-}=\sqrt{ 1.6g{\ell}{2}}\mathbf{e}_{2} \tag{3}
\begin{gather}
{m}{1}\mathbf{v}{1}^{+}\cdot \mathbf{e}{1}+{m}{2}\mathbf{v}{2}^{+}\cdot \mathbf{e}{1}=0 \[1ex]
{m}{1}{v}{1}^{+}+{m}{2}\mathbf{v}{2}^{+}\cdot \mathbf{e}{1}=0 \[1ex]
{v}{1}^{+}=-\dfrac{{m}{2}}{{m}{1}}\mathbf{v}{2}^{+}\cdot \mathbf{e}{1} \tag{4}
\end{gather}
\begin{aligned}
& \mathbf{e}{1}: & & -0.6\hat{T}{2}={m}{2}\mathbf{v}{2}^{+}\cdot \mathbf{e}{1} \[1ex]
& \mathbf{e}{2}: & & -0.8\hat{T}{2}={m}{2}\mathbf{v}{2}^{+} \cdot\mathbf{e}{2}-{m}{2}\sqrt{ 1.6{g\ell}{2} }
\end{aligned}
\dfrac{3}{4}=\dfrac{\mathbf{v}{2}^{+}\cdot \mathbf{e}{1}}{\mathbf{v}{2}^{+}\cdot \mathbf{e}{2}-\sqrt{ 1.6g{\ell}_{2} }}
\begin{gathered}
\dfrac{3}{4}=\dfrac{\mathbf{v}{2}^{+}\cdot \mathbf{e}{1}}{\dfrac{3}{4}v_{1}^{+}-\dfrac{3}{4}\mathbf{v}{2}^{+}\cdot \mathbf{e}{1} -\sqrt{ 1.6g{\ell}{2} }} \[1ex]
\dfrac{9}{16}{v}{1}^{+}-\dfrac{9}{16}\mathbf{v}{2}^{+}\cdot \mathbf{e}{1}-\dfrac{3}{4}\sqrt{ 1.6g{\ell}{2} }=\mathbf{v}{2}^{+}\cdot \mathbf{e}{1} \[1ex]
\dfrac{25}{16}\mathbf{v}{2}^{+}\cdot \mathbf{e}{1}=\dfrac{9}{16}{v}{1}^{+}-\dfrac{3}{4}\sqrt{ 1.6g{\ell}_{2} }
\end{gathered}
\begin{gathered}
\dfrac{25}{16}\mathbf{v}{2}^{+}\cdot \mathbf{e}{1}=-\dfrac{9}{16}\cdot \dfrac{{m}{2}}{{m}{1}}\mathbf{v}{2}^{+}\cdot \mathbf{e}{1}-\dfrac{3}{4}\sqrt{ 1.6g{\ell}{2} } \[1ex]
\dfrac{25{m}{1}+9{m}{2}}{16{m}{1}}\mathbf{v}{2}^{+}\cdot \mathbf{e}{1}=-\dfrac{3}{4}\sqrt{ 1.6g{\ell}{2} } \[1ex]
\mathbf{v}{2}^{+}\cdot \mathbf{e}{1}=-\dfrac{12{m}{1}}{25{m}{1}+9{m}{2}}\sqrt{ 1.6g{\ell}_{2} }
\end{gathered}
v_{1}^{+}=\dfrac{12{m}{2}}{25{m}{1}+9{m}{2}}\sqrt{ 1.6g{\ell}{2} }
\begin{aligned}
\mathbf{v}{2}\cdot \mathbf{e}{2} & =\dfrac{9{m}{2}}{25{m}{1}+9{m}{2}}\sqrt{ 1.6{\ell}{2} }+\dfrac{9{m}{1}}{25{m}{1}+9{m}{2}}\sqrt{ 1.6{\ell}{2} }
\end{aligned}
\boxed {
\begin{aligned}
& \mathbf{v}{1}^{+}=\dfrac{12{m}{2}}{25{m}{1}+9{m}{2}}\sqrt{ 1.6g{\ell}{2} }\mathbf{e}{1} \[1ex]
& \mathbf{v}{2}^{+}=\dfrac{\sqrt{ 1.6g{\ell}{2} }}{25{m}{1}+9{m}{2}}[-12{m}{1}\mathbf{e}{1}+9({m}{1}+{m}{2})\mathbf{e}_{2}]
\end{aligned}
}
\begin{gather}
\cancel{ {m}{1}\mathbf{v}{1}^{-}+{m}{2}\mathbf{v}{2}^{-} }+{m}{3}\mathbf{v}{3}^{-}={m}{1}\mathbf{v}{1}^{+}+\cancel{ {m}{2}\mathbf{v}{2}^{+} }+{m}{3}\mathbf{v}{3}^{+} \[1ex]
3m{v}{}\mathbf{e}{2}=m\mathbf{v}{1}^{+}+3m\mathbf{v}{3}^{+} \[1ex]
3{v}{}=\mathbf{v}{1}^{+}\cdot \mathbf{e}{2}+3\mathbf{v}{3}^{+}\cdot \mathbf{e}{2} \[1ex]
\mathbf{v}{1}^{+}\cdot \mathbf{e}{2}=3{v}{}-3\mathbf{v}{3}^{+}\cdot \mathbf{e}{2} \tag{1}
\end{gather}
e=-\dfrac{(\mathbf{v}{3}^{+}-\mathbf{v}{1}^{+})\cdot \mathbf{e}{n}}{(\mathbf{v}{3}^{-}-\mathbf{v}{1}^{-})\cdot \mathbf{e}{n}}
\begin{gather}
e=-\dfrac{(\mathbf{v}{3}^{+}-\mathbf{v}{1}^{+})\cdot(-\mathbf{e}{2})}{({v}\mathbf{e}{2}-0)\cdot(-\mathbf{e}{2})} \[1ex]
-{v}e=(\mathbf{v}{3}^{+}-\mathbf{v}{1}^{+})\cdot \mathbf{e}{2} \tag{2}
\end{gather}
\begin{gathered}
-ve=\mathbf{v}{3}^{+}\cdot \mathbf{e}{2}-3{v}{}+3\mathbf{v}{3}^{+}\cdot \mathbf{e}{2} \[1ex]
\mathbf{v}{3}\cdot \mathbf{e}_{2} =\dfrac{1}{4}(3-e)v
\end{gathered}
\begin{gathered}
-ve=\dfrac{1}{4}(3-e)v-\mathbf{v}{1}^{+}\cdot \mathbf{e}{2} \[1ex]
\mathbf{v}{1}^{+}\cdot \mathbf{e}{2}=\dfrac{1}{4}(3+3e)v
\end{gathered}
\boxed{\begin{aligned}
& \lvert \mathbf{v}{1} \rvert=\dfrac{3}{4}(1+e)v \[1ex]
& \lvert \mathbf{v}{3} \rvert=\dfrac{1}{4}(3-e)v
\end{aligned} }
\boxed {
\lvert \mathbf{v}_{2} \rvert=0
}
\begin{gathered}
\mathbf{H}{c}(x)\cdot \mathbf{e}{3}=\mathbf{H}{c}(L)\cdot \mathbf{e}{3} \[1ex]
(\mathbf{r}{1c}\times m\mathbf{v}{1c}+\mathbf{r}{2c}\times m\mathbf{v}{2c})\cdot \mathbf{e}{3}=\mathbf{H}{c}(L)\cdot \mathbf{e}_{3}
\end{gathered}
\begin{aligned}
\mathbf{r}{1c}=\dfrac{2}{3}x\mathbf{e}{1}’ & & \mathbf{r}{2c}=-\dfrac{1}{3}x\mathbf{e}{1}‘
\end{aligned}
\begin{aligned}
\mathbf{v}{1c}=\dfrac{2}{3}\dot{x}\mathbf{e}{1}’+\dfrac{2}{3}x\dot{\theta}\mathbf{e}{2}’ & & \mathbf{v}{2c}=-\dfrac{1}{3}\dot{x}\mathbf{e}{1}’-\dfrac{1}{3}x\dot{\theta}\mathbf{e}{2}‘
\end{aligned}
\begin{aligned}
\mathbf{H}{c}(L) & =\dfrac{2}{3}L\mathbf{e}{1}\times {m}{1}\dfrac{3}{4}(1+e)v\mathbf{e}{2} \[1ex]
& =\dfrac{1}{2}Lmv(1+e)\mathbf{e}_{3}
\end{aligned}
\begin{gathered}
\left( m\dfrac{4}{9}x^{2}\dot{\theta}\mathbf{e}{3}‘+2m\cdot\dfrac{1}{9}x^{2}\dot{\theta}\mathbf{e}{3}’ \right)\cdot \mathbf{e}{3}=\left( \dfrac{1}{2}Lmv(1+e)\mathbf{e}{3} \right)\cdot \mathbf{e}_{3} \[1ex]
\dfrac{2}{3}mx^{2}\dot{\theta}=\dfrac{1}{2}Lmv(1+e) \[1ex]
\boxed {
\dot{\theta}=\dfrac{3}{4} \dfrac{L}{x^{2}}v(1+e)
}
\end{gathered}
\begin{gathered}
T(x)+V_{e}(x)=T(L)+V_{e}(L) \end{gathered}
V_{e}(x)=\dfrac{1}{2}k(x-L)^{2}
\begin{aligned}
T(x) & =\dfrac{1}{2}(m+2m)\lvert \mathbf{v}{c} \rvert^{2}+\dfrac{1}{2}{m}{1}{\mathbf{v}{1c}}^{2}+\dfrac{1}{2}{m}{2}{\mathbf{v}{2c}}^{2} \[1ex]
& =\dfrac{3}{2}m\lvert \mathbf{v}{c} \rvert^{2}+\dfrac{1}{2}m\left( \dfrac{4}{9}\dot{x}^{2}+\dfrac{4}{9}x^{2}\dot{\theta}^{2} \right)+m\left( \dfrac{1}{9}\dot{x}^{2}+\dfrac{1}{9}x^{2}\dot{\theta}^{2} \right) \[1ex]
& =\dfrac{3}{2}m\lvert \mathbf{v}_{c} \rvert^{2}+\dfrac{1}{3}m\dot{x}^{2}+\dfrac{1}{3}mx^{2}\dot{\theta}^{2}
\end{aligned}
\begin{gathered}
\mathbf{G}(x)=\mathbf{G}(L) \[1ex]
(m+2m)\mathbf{v}_{c}=\mathbf{G}(L)
\end{gathered}
\begin{aligned}
\mathbf{G}(L) & =m\mathbf{v}{1}^{+}+\cancel{ 2m\mathbf{v}{2}^{+} } \[1ex]
& =\dfrac{3}{4}mv(1+e)\mathbf{e}_{2}
\end{aligned}
\begin{gathered}
3m\mathbf{v}{c}=\dfrac{3}{4}mv(1+e)\mathbf{e}{2} \[1ex]
\mathbf{v}{c}=\dfrac{1}{4}v(1+e)\mathbf{e}{2}
\end{gathered}
\mathbf{v}{c}=\dfrac{1}{3}{v}{1}
\begin{aligned}
T(x) & =\dfrac{3}{2}m\cdot \dfrac{1}{9}{{v}{1}}^{2}+\dfrac{1}{3}m\dot{x}^{2}+\dfrac{1}{3}mx^{2}\dot{\theta}^{2} \[1ex]
& =\dfrac{3}{18}m{{v}{1}}^{2}+\dfrac{1}{3}m\dot{x}^{2}+\dfrac{1}{3}mx^{2}\dot{\theta}^{2}
\end{aligned}
\begin{aligned}
T(L) & =\dfrac{1}{2}m\lvert \mathbf{v}{1}^{+} \rvert^{2} \[1ex]
& =\dfrac{1}{2}m{{v}{1}}^{2}
\end{aligned}
\begin{gathered}
\dfrac{3}{18}m{{v}{1}}^{2}+\dfrac{1}{3}m\dot{x}^{2}+\dfrac{1}{3}mx^{2}\dot{\theta}^{2}+\dfrac{1}{2}k(x-L)^{2}=\dfrac{1}{2}m{{v}{1}}^{2} \[1ex]
\boxed {
\dfrac{1}{3}m\dot{x}^{2}+\dfrac{1}{3}mx^{2}\dot{\theta}^{2}+\dfrac{1}{2}k(x-L)^{2}=\dfrac{1}{3}m{{v}_{1}}^{2}
}
\end{gathered}
\begin{gathered}
\mathbf{H}{O}^{-}\cdot \mathbf{e}{3}=\mathbf{H}{O}^{+}\cdot \mathbf{e}{3} \[1ex]
(\mathbf{r}{1}^{-}\times m\mathbf{v}{1}^{-}+\mathbf{r}{2}^{-}\times m\mathbf{v}{2}^{-})\cdot \mathbf{e}{3}=(\mathbf{r}{1}^{+}\times m\mathbf{v}{1}^{+}+\mathbf{r}{2}^{+}\times m\mathbf{v}{2}^{+})\cdot \mathbf{e}{3}
\end{gathered}
\begin{aligned}
& \mathbf{r}{1}^{-}=\mathbf{r}{1}^{+}=2R\mathbf{e}{1}’ \[1ex]
& \mathbf{r}{2}^{-}=\mathbf{r}{2}^{+}=2R\mathbf{e}{1}’ \[1ex]
& \mathbf{v}{1}^{-}=-{v}{0}\mathbf{e}{2}’ \[1ex]
& \mathbf{v}{2}^{-}=0
\end{aligned}
\begin{aligned}
\mathbf{v}{1}^{+}={v}{1}^{+}\mathbf{e}{2}’ & & \mathbf{v}{2}^{+}={v}{2}^{+}\mathbf{e}{2}‘
\end{aligned}
\begin{gather}
(-2mR{v}{0}\mathbf{e}{3}‘+0)\cdot \mathbf{e}{3}=(2mR{v}{1}^{+}\mathbf{e}{3}‘+2mRv{2}^{+}\mathbf{e}{3}’)\cdot \mathbf{e}{3} \[1ex]
-2{v}{0}=2{v}{1}^{+}+2{v}{2}^{+} \[1ex]
-{v}{0}={v}{1}^{+}+{v}{2}^{+} \tag{1}
\end{gather}
e=-\dfrac{(\mathbf{v}{2}^{+}-\mathbf{v}{1}^{+})\cdot \mathbf{e}{n}}{(\mathbf{v}{2}^{-}-\mathbf{v}{1}^{-})\cdot \mathbf{e}{n}}
\begin{gather}
e=-\dfrac{v_{2}^{+}-{v}{1}^{+}}{0+{v}{0}} \[1ex]
e{v}{0}=-(v{2}^{+}-{v}_{1}^{+}) \tag{2}
\end{gather}
\begin{aligned}
{v}{1}^{+}=-\dfrac{1}{2}(1-e){v}{0} & & {v}{2}^{+}=-\dfrac{1}{2}(1+e){v}{0}
\end{aligned}
\boxed {
\begin{aligned}
\lvert \mathbf{v}{1}^{+} \rvert=\dfrac{1}{2}(1-e){v}{0} & & \lvert \mathbf{v}{2}^{+} \rvert=\dfrac{1}{2}(1+e){v}{0}
\end{aligned}
}
\begin{aligned}
\mathbf{v}{1}^{+}=-\dfrac{1}{4}{v}{0}\mathbf{e}{2}’ & & \mathbf{v}{2}^{+}=-\dfrac{3}{4}{v}{0}\mathbf{e}{2}‘
\end{aligned}
\begin{gathered}
T(x)+V_{e}(x)=T(R)+V_{e}(R) \end{gathered}
V_{e}(x)=\dfrac{1}{2}k(x-R)^{2}
\begin{aligned}
T(x) & =\dfrac{1}{2}m{\mathbf{v}{2}}^{2}+\dfrac{1}{2}m{\mathbf{v}{3}}^{2}
\end{aligned}
\begin{aligned}
T(R) & =\dfrac{1}{2}m\left( \dfrac{3}{4}{v}{0} \right)^{2}+0 \[1ex]
& =\dfrac{9}{32}m{{v}{0}}^{2}
\end{aligned}
\dfrac{1}{2}m\lvert \mathbf{v}{2} \rvert^{2}+\dfrac{1}{2}m\lvert \mathbf{v}{3} \rvert^{2}+\dfrac{1}{2}k(x-R)^{2}=\dfrac{9}{32}m{{v}_{0}}^{2}
\begin{aligned}
\mathbf{v}{2}={v}{2}\mathbf{e}{2}’ & & \mathbf{v}{3}={v}{3}\mathbf{e}{2}‘
\end{aligned}
\dfrac{1}{2}m{{v}{2}}^{2}+\dfrac{1}{2}m{{v}{3}}^{2}+\dfrac{1}{2}k(x-R)^{2}=\dfrac{9}{32m{{v}_{0}}^{2}}
\mathbf{H}{O}(x)\cdot \mathbf{e}{3}=\mathbf{H}{O}(R)\cdot \mathbf{e}{3}
\begin{aligned}
\mathbf{H}{O}(x) & =\mathbf{r}{2}\times m\mathbf{v}{2}+\mathbf{r}{3}\times m\mathbf{v}{3} \[1ex]
& =2Rm{v}{2}\mathbf{e}{3}‘+Rm{v}{3}\mathbf{e}_{3}‘
\end{aligned}
\begin{aligned}
\mathbf{H}{O}(R) & =2R\mathbf{e}{1}‘\times m\left( -\dfrac{3}{4}{v}{0}\mathbf{e}{2}’ \right) \[1ex]
& =-\dfrac{3}{2}Rm{v}{0}\mathbf{e}{3}‘
\end{aligned}
\begin{gathered}
2Rm{v}{2}+Rm{v}{3}=-\dfrac{3}{2}Rm{v}{0} \[1ex]
2{v}{2}+{v}{3}=-\dfrac{3}{2}{v}{0} \[1ex]
{v}{3}=-\dfrac{3}{2}{v}{0}-2{v}_{2}
\end{gathered}
\begin{gather}
\dfrac{1}{2}m{{v}{2}}^{2}+\dfrac{1}{2}m\left( -\dfrac{3}{2}{v}{0} -2{v}{2}\right)^{2}+\dfrac{1}{2}k(x-R)^{2}=\dfrac{9}{32}m{{v}{0}}^{2} \[1ex]
\dfrac{1}{2}{{v}{2}}^{2}+\dfrac{1}{2}\left[ \dfrac{9}{4}{{v}{0}}^{2}+6{v}{0}{v}{2}+4{{v}{2}}^{2} \right]+\dfrac{1}{2} \dfrac{k}{m}(x-R)^{2}=\dfrac{9}{32}{{v}{0}}^{2} \[1ex]
\dfrac{5}{2}{{v}{2}}^{2}+3{v}{0}{v}{2}+\dfrac{27}{32}{{v}{0}}^{2}+\dfrac{1}{2} \dfrac{k}{m}(x-R)^{2}=0 \tag{3}
\end{gather}
\begin{gathered}
5{v}{2}\dot{v}{2}+3{v}{0}\dot{v}{2}+ \dfrac{k}{m}\dot{x}(x-R)=0
\end{gathered}
\begin{gathered}
\dfrac{k}{m}\dot{x}(x-R)=0 \[1ex]
\dot{x}=0 \qquad \text{or} \qquad x=R
\end{gathered}
\boxed{{v}{2}=\dfrac{3}{4}{v}{0} }
\begin{gathered}
5{v}{2}\dot{v}{2}+3{v}{0}\dot{v}{2}+ \dfrac{k}{m}\dot{x}(x-R)=0
\end{gathered}
\begin{gathered}
5{v}{2} \dot{v}{2}+3{v}{0}\dot{v}{2}=0
\end{gathered}
{v}{2}=-\dfrac{3}{5}{v}{0}
\begin{gathered}
\dfrac{9}{10}{{v}{0}}^{2}+3\cdot-\dfrac{3}{5}{{v}{0}}^{2}+\dfrac{27}{32}{{v}{0}}^{2}+\dfrac{1}{2} \dfrac{k}{m}(x-R)^{2}=0 \[1ex]
\boxed {
-\dfrac{9}{160}{{v}{0}}^{2}+\dfrac{1}{2} \dfrac{k}{m}(x-R)^{2}=0
}
\end{gathered}