מצאתם טעות? תפתחו discussion! (צריך לפתוח משתמש, די באסה).
SLD1_001 הקדמה ומושגי יסוד
הקדמה - הגדרות ופעולות
מוסכמות
מכניקה - ענף של פיזיקה העוסק בתגובה של חומרים ומבנים לעומסים שפועלים עליהם.
נהוג לחלק את המכינקה לסטטיקה ודינמיקה. סטטיקה - גוף בשיווי במשקל (ש”מ). דינמיקה - גוף שאינו בשיווי משקל.
סימונים:
בהינתן שני גופים , נסמן את הכוח ש- מפעיל על ב- או (מודגש). נשים לב כי זהו שונה מהסימון הידוע . באותו אופן, נסמן את הכוח ש- מפעיל על ב-.
את וקטורי היחידה נסמן במקום בסימונים . בנוסף, את נרמול הוקטור , נסמן ב- במקום .
מכפלה וקטורית - למדנו בחדו”א 2:
כאשר:
וגודל זה הוא שטח המקבילית הנוצרת בין ו-.
הכיוון של הוא ניצב למישור שמוגדר ע”י ו-.
בהינתן ו-, נוכל לחשב את בעזרת דטרמיננטה:
כוחות
כוח
ניזכר בכוח מפיזיקה. כוח הוא אמצעי שבעזרתו מרגיש גוף אחד בנוכחות השני.
וואלה מגניב. הגדרה מאוד כללית ומופשטת. אבל כוח הוא באמת כך - מופשט, ואף מושג פילוסופי. את הכוחות בקורס זה לרוב נסמן באות , והוא יהיה בין שניים או יותר גופים.
כוחות מרכזיים
בהינתן שני חלקיקים , הכוח ש- מפעיל על , ו- מפעיל על - נקראים כוחות מרכזיים. הם נקראים כך כיוון שכוחות אלו פועלים לכיוון “המרכז” של ו-.
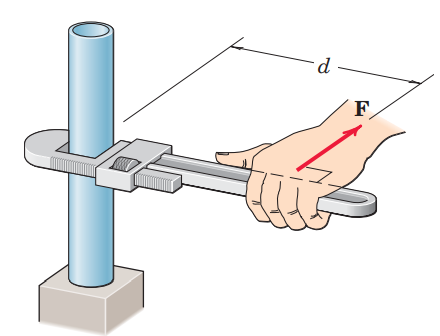
מעבר מהנטייה להזיז גוף בכיוון מסוים, כוח יכול גם לגרום לגוף להסתובב סביב ציר מסוים. ציר זה יכול להיות כל קו שלא חותך או מקביל לכיוון הכוח. הנטייה הסיבובית הזאת נקראת מומנטשל הכוח. מומנט נקרא גם טורק ().
הכוח שמפעילה היד על המפתח יוצר מומנט סביב העמוד.
הגדרה:
בהינתן כוח ונקודה במרחב , המומנט סביב הנקודה , המסומן מוגדר כך:
כאשר הוקטור הוא וקטור המרחק מ- ל-.
הערות:
נשים לב כי מההגדרה נובע כי גודל המומנט תלוי במרחק של מנקודת הפעלת הכוח, וגם בגודל הכוח:
מימד הגודל הזה הוא כוח כפול מרחק:
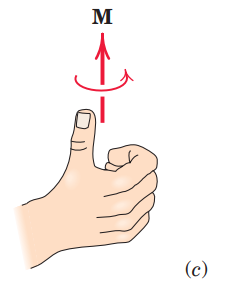
זוהי מכפלה וקטורית, ולכן כיוון המומנט הוא בכיוון המאונך ל- ו-. באיור של המפתח, המומנט הוא בכיוון כלפי מעלה (לפי כלל יד ימין). למעשה, לפי כלל יד ימין, נוכל להסיק את הכיוון בו הצינור יסתובב (נגד כיוון השעון):
גודל המומנט תלוי בגודל הכוח ובמרחק של נקודת הייחוס מקו הפעולה של . לכן, הזזה של הכוח לאורך קו הפעולה לא משנה את המומנט שהוא יוצר.
משפט ואריגנון
משפט:
המומנט השקול הנוצר ממספר כוחות שווה לסכום המומנטים של כלל הכוחות:
עבור גוף בשיווי משקל המומנט מתאפס לכל נקודה
משפט:
אם וגם עבור נקודה כלשהי, אז ביחס לכל נקודה במרחב.
הוכחה:
נתון כי:
וגם:
תרגיל:
נתון התרשים הבא:
מהו המומנט שמפעיל הכוח ביחס לנקודה בה נמצא הבורג? פתרון:
לפי הגדרת המומנט:
נחשב את שני הוקטור ואת הכוח:
נציב ונקבל:
תרגיל:
פלטה מרובעת נתמכת ע”י צירים לאורך הקו ובאמצעות כפל כאשר הנקודה נמצאת במרכז הקטע . נסמן את וקטור המתיחות של הכפל באמצעות . בנוסף, גודל המתיחות בכבל . את הזווית באיור שמוגדרת כ- נסמן ב-.
בנוסף, נתון כי ו- .
מהו כיוון המישור של המישור העליון של הפלטה ? פתרון:
נתון כי במרכז .
כיוון מישור :
ניתן להגדיר מישור ע”י הנורמל למישור. כדי למצוא את הנורמל, נבצע מכפלה וקטורית:
נחזור לשאלה. נרצה לחשב:
אז נשים לב כי:
וכעת נוכל לחשב:
מהו היטל על ? פתרון:
נסמן ב- את ההיטל:
נבצע מכפלה סקלרית (פנימית):
וכעת:
מהו רכיב הכוח שניצב ל-? פתרון:
נסמן את הניצב ב-.
מהו מומנט ביחס ל-? פתרון:
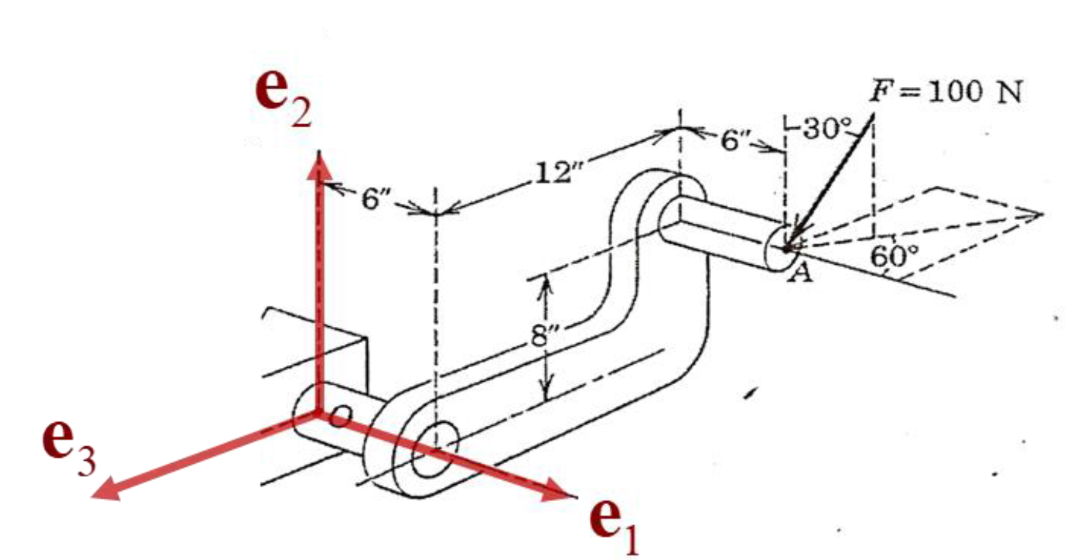
תרגיל:
נתונה המערכת המתוארת בציור שעלה פועל הכוח. דרוש לחשב את המומנט שיוצר הכוח על הנקודה . פתרון:
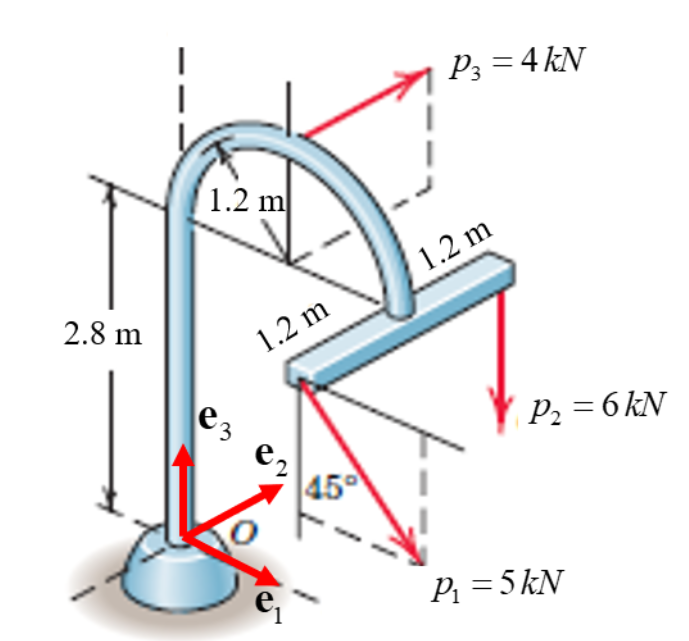
תרגיל:
נתון המבנה של מנורת רחוב כמתואר בציור. המנורה מקובעת לבסיס שמפעיל עליה בנק’ כוח שקול ומומנט טהור שקול.
מסת המבנה זניחה ביחס לכוחות הפועלים על המבנה.
מהו המומנט השקול שיוצרים הכוחות על המבנה ביחס לנקודה ? פתרון: